Álgebra Linear Computacional
Trabalhando com Vetores


Este texto destina-se aos estudantes da disciplina de Álgebra Linear Computacional, presente nos primeiros semestres dos cursos de graduação da área de Ciências Exatas. Por isso, faremos uma explanação clara e objetiva, utilizando uma linguagem e notação matemática para um entendimento que poderá ser usado em outras disciplinas. Por exemplo, em análises de estruturas o estudante deve utilizar corretamente o conceito de análise vetorial colocando os vetores corretamente na estrutura. Esse domínio será muito importante, pois com isso você poderá usar um software para fazer a análise computacional da estrutura.
Neste primeiro momento, estudaremos as representações dos vetores em um espaço de até 3 dimensões (tridimensional). Além disso, veremos duas representações para os vetores, a geométrica e a algébrica. Aprenderemos, também, a realizar operações básicas entre vetores e multiplicação por escalar, o processo de normalização e verificação de igualdade entre vetores.
Vetor é um segmento de reta orientado que apresenta módulo (tamanho), direção e sentido. Os vetores são usados para expressar grandezas físicas vetoriais, isto é, aquelas que são definidas pelo seu valor numérico, sua direção (horizontal e vertical), e também pelo seu sentido (para cima ou para baixo).
A representação gráfica de um vetor é dada por uma seta, e possui em suas extremidades dois pontos que o determinam (WINTERLE, 2000). Intuitivamente, seta é um segmento no qual se fixou uma orientação. E fixar uma orientação é escolher um sentido. No caso da Figura 1.1, o segmento orientado representado tem orientação de A para B.
As notações matemáticas para um vetor podem ser as mais diversas, dependendo do autor, as mais usuais são \(AB\), os dois pontos que deram origem ao vetor seguido de uma flecha sobre eles \(\overrightarrow{AB}\), uma letra minúscula seguida de uma flecha \(\vec{v}\) , uma letra minúscula em negrito \(v\).
Para fins de padronização, utilizaremos \(v\) como representação de um vetor.
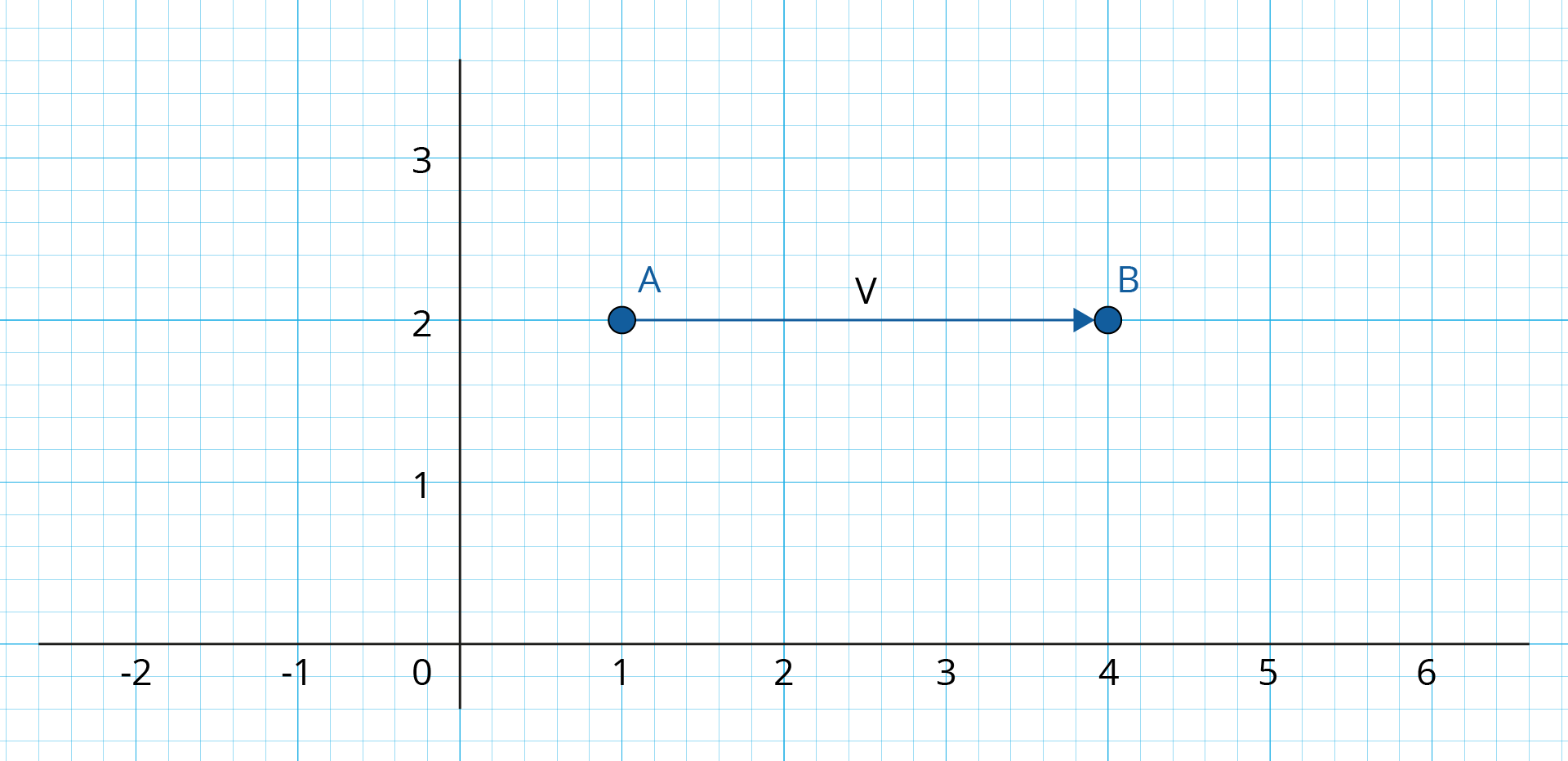
O módulo de um vetor é o comprimento dele, por exemplo, na figura 1.3 a seguir temos um vetor \(v\) com origem em (1,2) e final em (4,2). O módulo será a distância do ponto de origem até o ponto de destino. Verificamos pela figura 1.3 que o comprimento do vetor \(v\) é 3. A direção é o sentido que representamos quando desenhamos o vetor em um plano cartesiano. Observamos pela figura 1.3 que o vetor \(v\) possui direção horizontal e sentido da esquerda para direita.
O vetor que possui sua origem coincidindo com a sua extremidade é chamado vetor nulo denotado por 0 . Note que o vetor nulo é apenas um ponto no espaço.
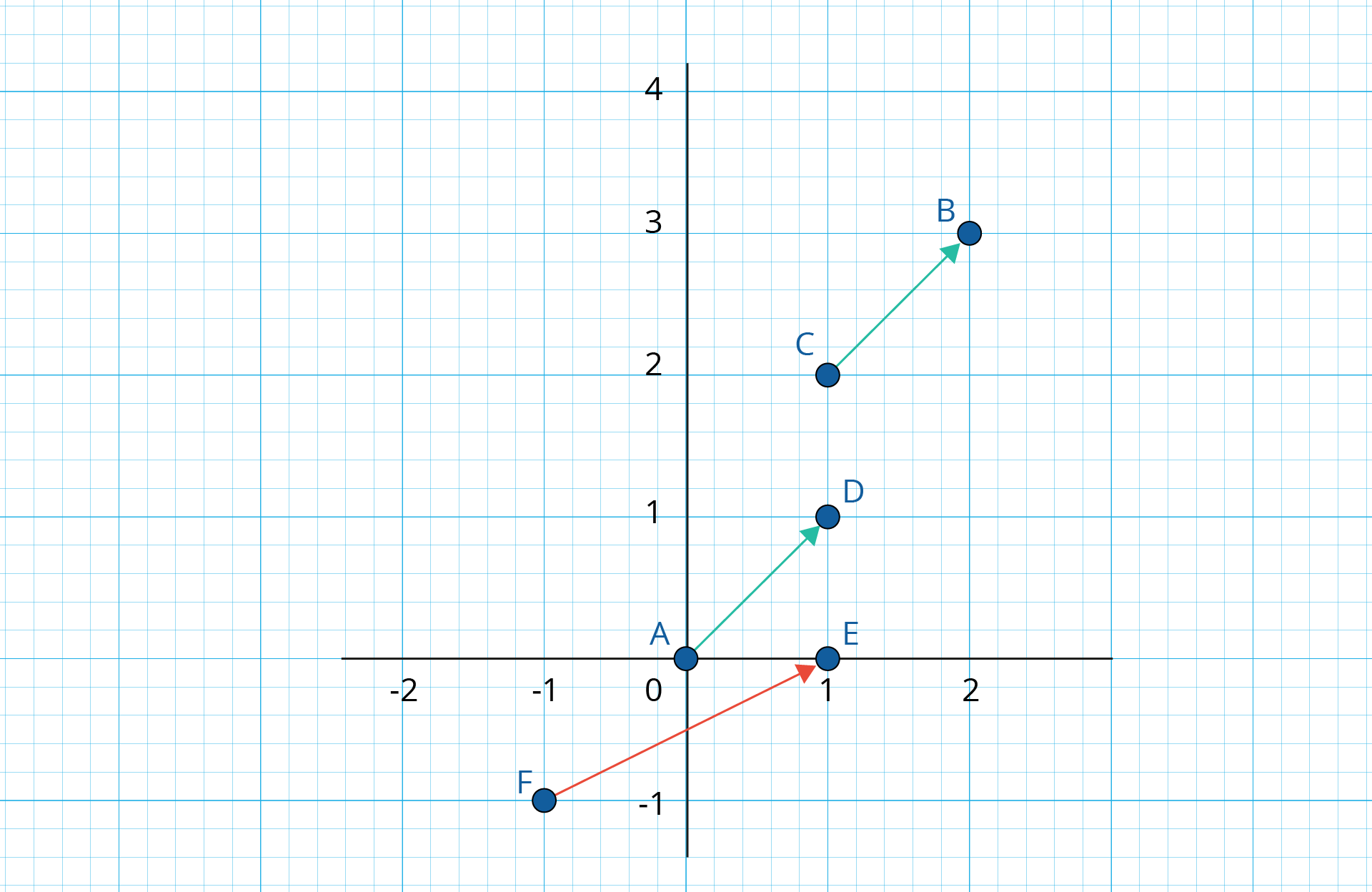
Exemplo 1: Dados dois vetores AB e CD , dizemos que AB é equivalente a CD se B-A=D-C. Para verificarmos essa situação considere os seguintes pontos no plano:
a) \(A=\left( 0,0 \right),~B=\left( 2,3 \right),~C=\left( 1,2 \right),~D=\left( 1,1 \right),~E=\left( 1,0 \right)~,~F=\left( -1,-1 \right).\)
Então, AD é equivalente a CB , pois
b) \(D-A=\left( 1,1 \right)-\left( 0,0 \right)=\left( 1,1 \right)\)
c) \(B-C=\left( 2,3 \right)-\left( 1,2 \right)=\left( 1,1 \right).\)
Contudo, podemos verificar que o vetor FE , \(E-F=\left( 1,0 \right)-\left( -1,-1 \right)=\left( 2,1 \right),\) não é equivalente a AD e CB . Os vetores AD , CB e FE são representados na figura 1.4.
Observação: A equivalência de vetores é análoga ao que ocorre com os números racionais e as frações. Duas frações representam o mesmo número racional se o numerador e o denominador de cada uma delas estiverem na mesma proporção. Por exemplo, ½ é equivalente a 2/4 e 3/6, e representam o mesmo número racional.
Nesta seção iremos apresentar as seguintes operações vetoriais: Adição de vetores e produto de um escalar por um vetor.
Consideremos os vetores \(u\) e \(v\), cuja soma \(u+v\) pretendemos encontrar. Para isso, tomemos um ponto A qualquer e, com origem nele, tracemos o segmento orientado AB representante do vetor \(u\). A partir de A, tracemos o segmento orientado AC representante de \(v\). O vetor representado pelo segmento orientado de origem A e extremidade D é, por definição, o vetor soma de \(u\) por \(v\). Essa regra é conhecida como regra do Paralelogramo.
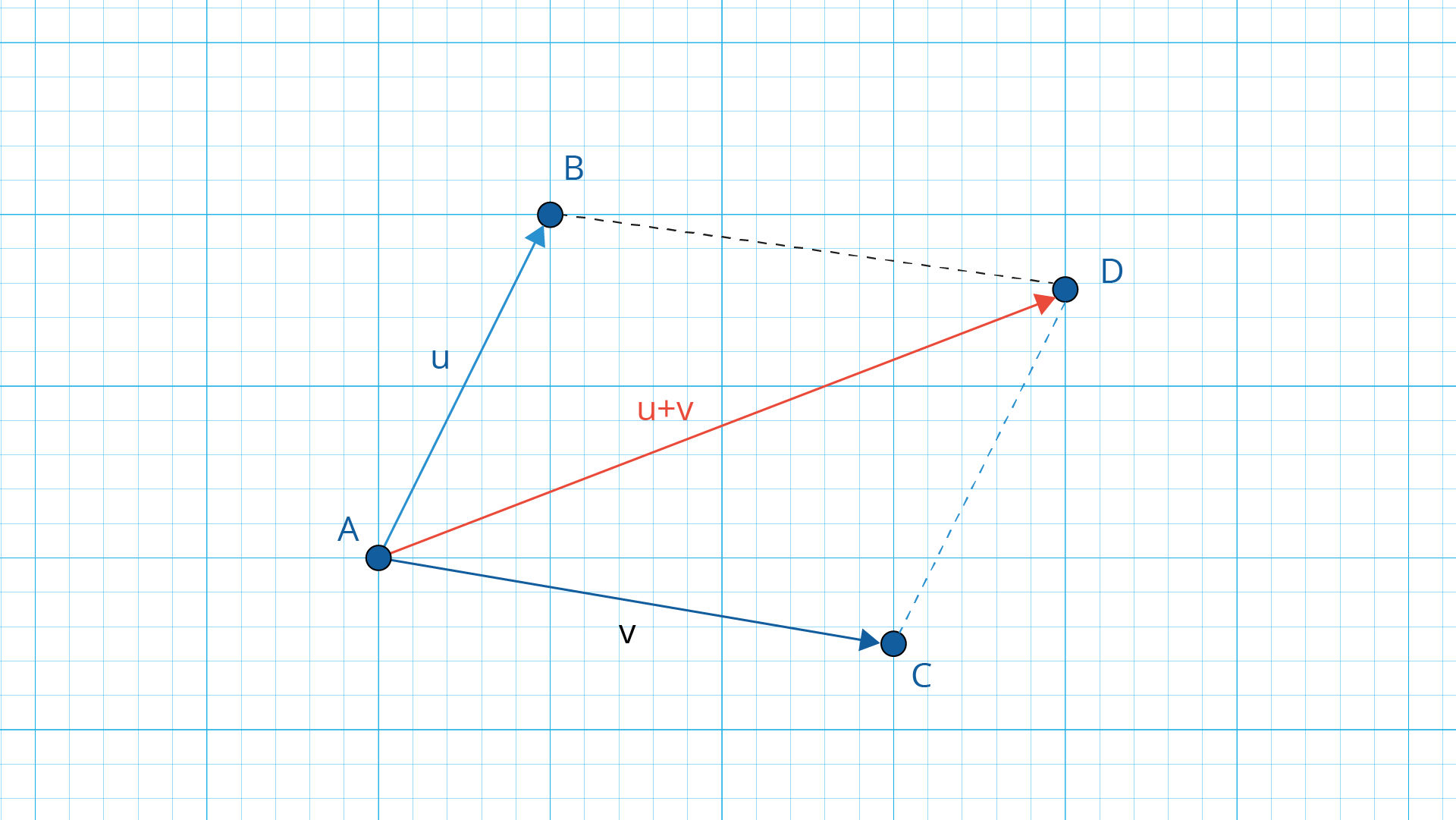
Observe que a soma \(u+v\) está na diagonal do paralelogramo determinado por \(u\) e \(v\), quando estão representados com a mesma origem.
Sendo \(u,~v\) e \(w\) vetores quaisquer, a adição admite as seguintes propriedades:
i) Comutativa: \(u+v~=~v+u\)
ii) Associativa: \(\left( u+v \right)+w~=~u+\left( v+w \right)\)
iii) Elemento neutro: \(u+0~=~u\)
iv) Elemento oposto: \(u+\left( -u \right)=0\)
O vetor \(u+(-v)\) , escreve-se \(u-v\), e é chamado de diferença entre \(u\) e \(v\).
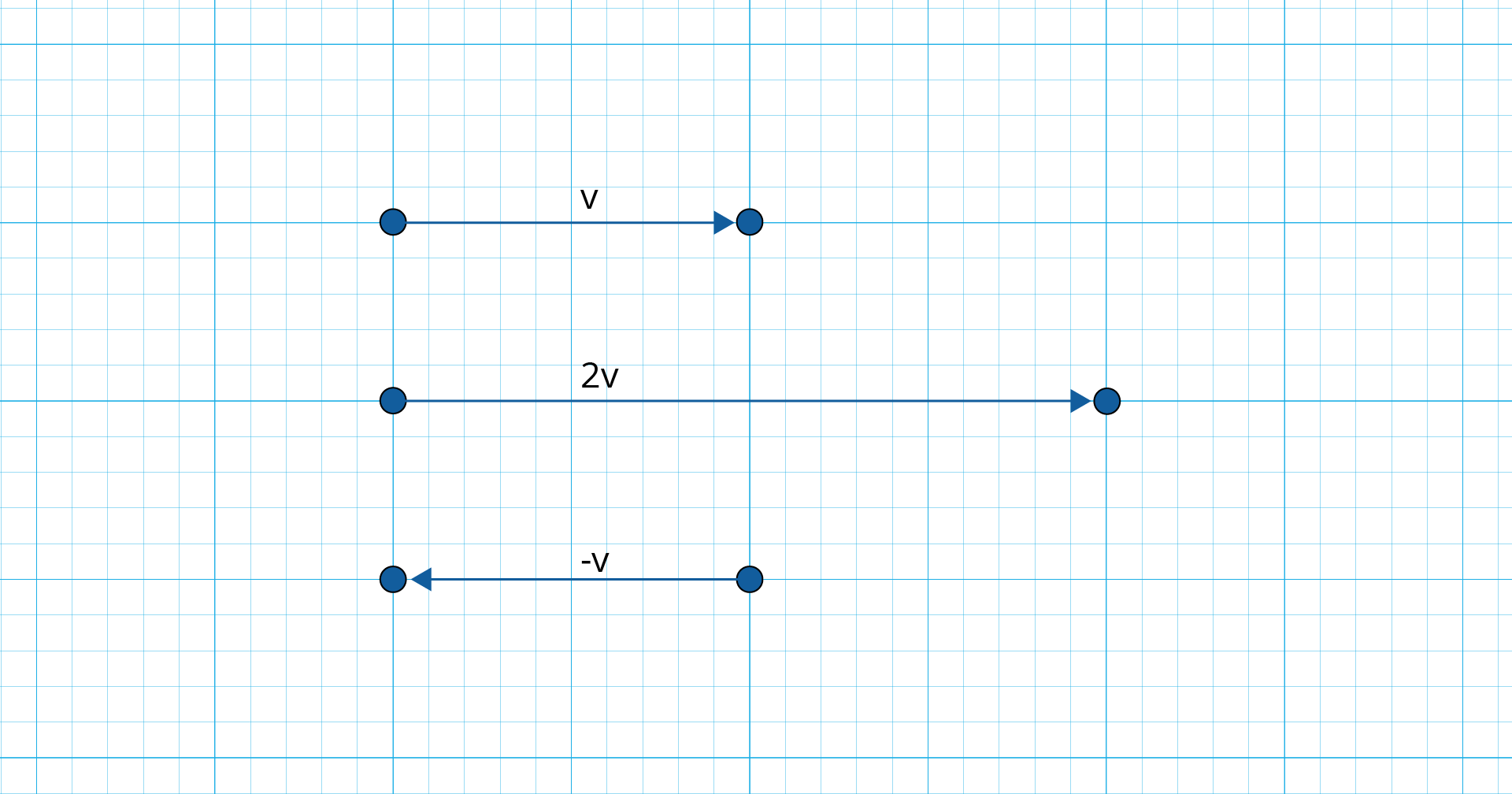
A multiplicação de um vetor \(v~\ne ~0\) por um escalar e um escalar \(\alpha ~\ne ~0\), chama-se produto do número real 𝛂 pelo vetor \(v\), o vetor \(\alpha v\) tal que
\(\left| \alpha v \right|~=~\left| \alpha \right||v|\), ou seja, \(\alpha v\) é o comprimento de \(v\) multiplicado por \(~\left| \alpha \right|\).
\(|\alpha |\) é paralelo a \(v\).
\(u\) e \(v\) têm o mesmo sentido se \(\alpha >0\), e contrário se \(\alpha <0\).
A Figura 1.6 apresenta o vetor \(v\) e alguns de seus múltiplos.
Sejam os vetores \(u\) e \(v\) e \(\alpha \) e \(\beta \) escalares. São válidas as seguintes propriedades:
As operações com vetores podem ser definidas utilizando um sistema de coordenadas cartesianas. Primeiramente, vamos considerar os vetores no plano.
Seja v um vetor no plano \({{R}^{2}}\). Definimos as componentes de \(v\) como sendo as coordenadas \(\left( {{v}_{1}},{{v}_{2}} \right)\) do ponto final do representante de \(v\) que tem ponto inicial na origem.
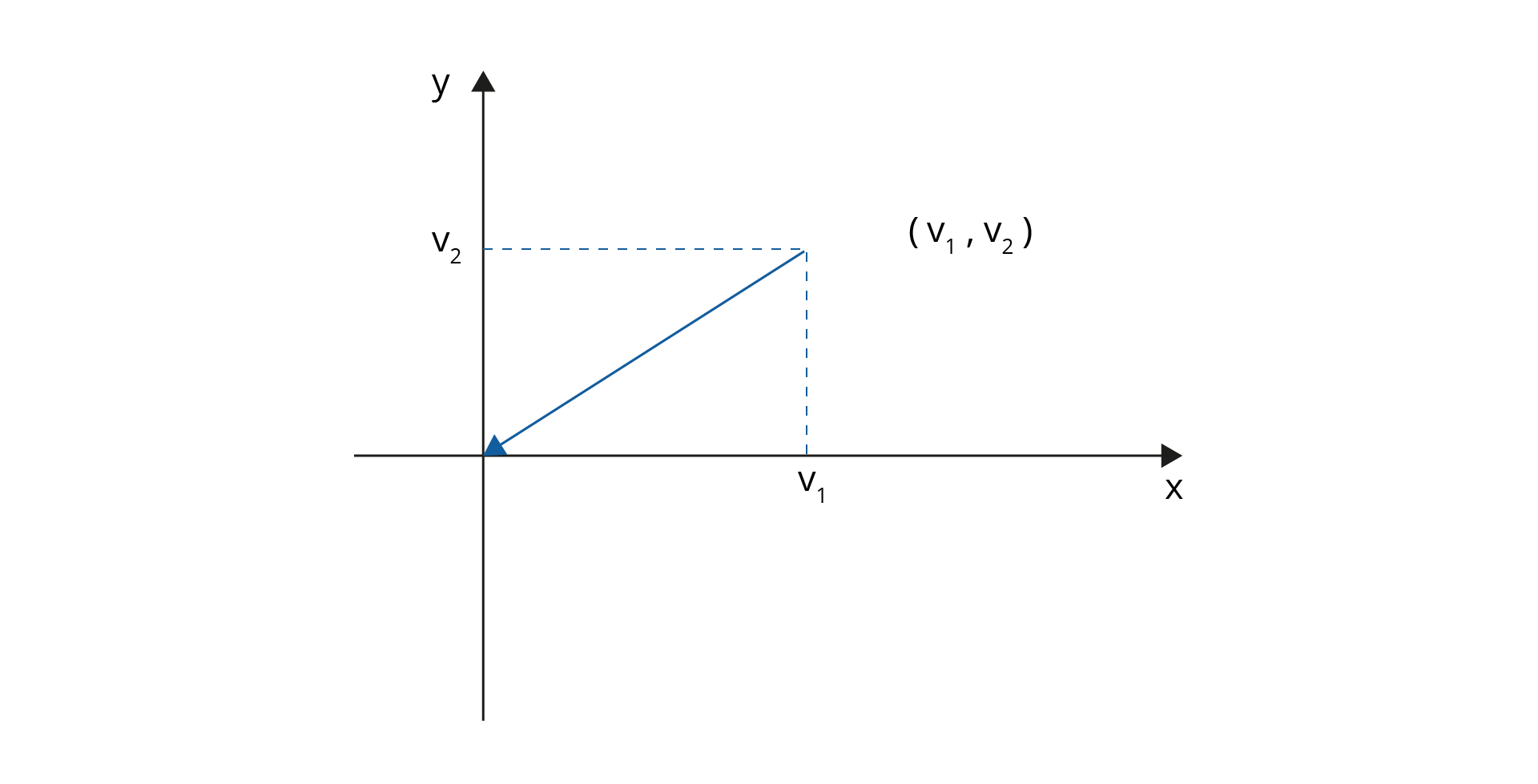
Identificamos o vetor com as suas componentes e vamos escrever simplesmente
\[v=\left( {{v}_{1}},{{v}_{2}} \right)\]
Em termos das componentes podemos realizar as operações: adição e multiplicação por escalar.
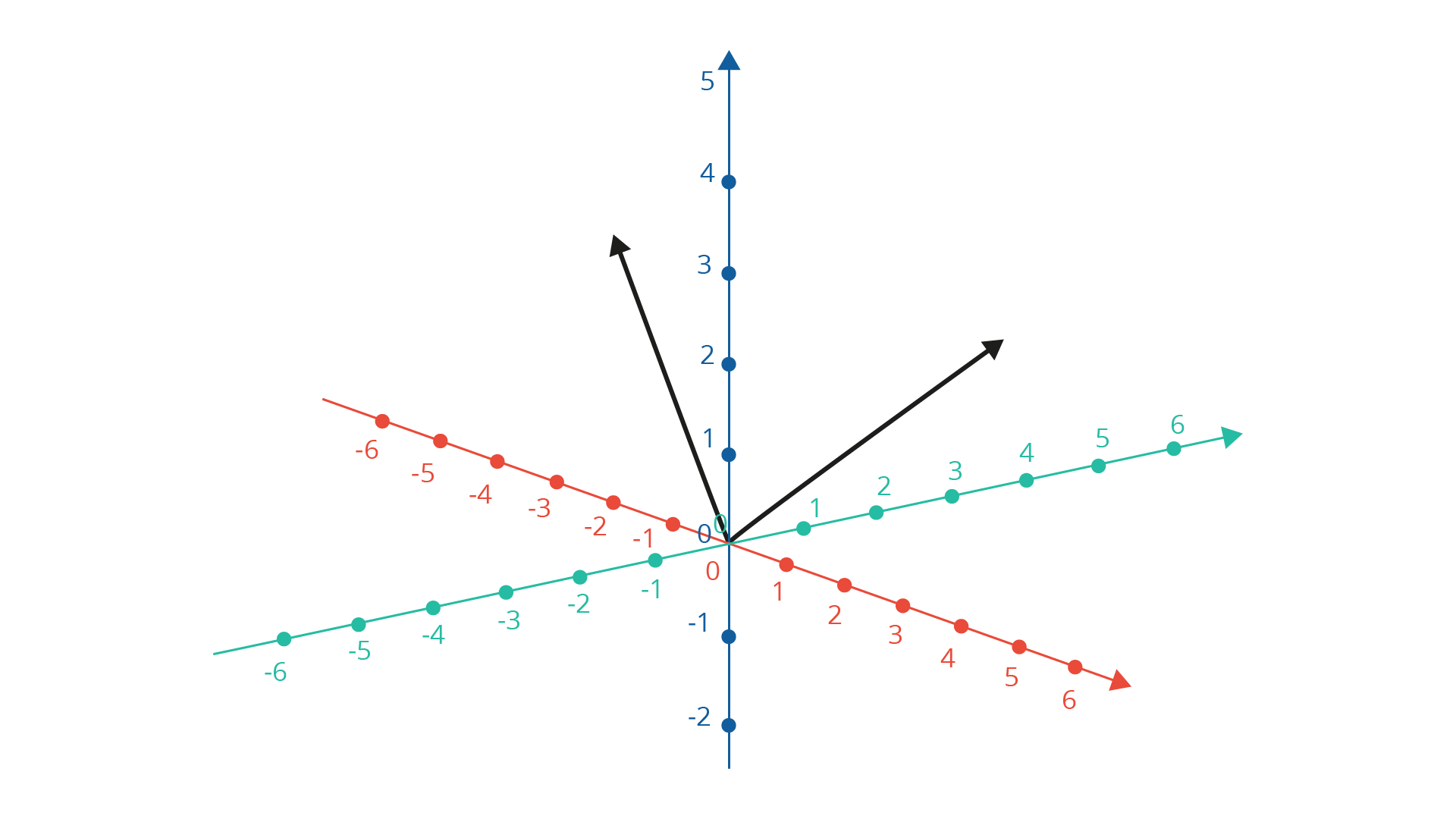
Analogamente, definimos a adição e multiplicação por escalar de um vetor v no espaço R3 (no caso os vetores têm 3 coordenadas como mostrado na figura 1.8. Como no caso de vetores no plano, definimos as componentes de \(v\) como sendo as coordenadas \(v=({{v}_{1}},{{v}_{2}},{{v}_{3}})\)
Exemplo 2: Se \(v=(2,3,0)\), \(w=(-5,0,3)\), então:
\[v+w=(2,3,0)+\left( -5,0,3 \right)=\left( 2+\left( -5 \right),3+0,0+3 \right)=\left( -3,3,3 \right)$\]
\[2v=\left( 2.\left( 2 \right),2.\left( 3 \right),2.\left( 0 \right) \right)=\left( 4,6,0 \right)\]
IGUALDADE - PARALELISMO - MÓDULO DE UM VETOR
As definições e conclusões no espaço são análogas às do plano:
I) Dois vetores \(u=\left( {{u}_{1}},{{u}_{2}},{{u}_{3}} \right)\) e \(v=\left( {{v}_{1}},{{v}_{2}},{{v}_{3}} \right)\) são iguais se, e somente se, \({{u}_{1}}={{v}_{1}},~{{u}_{2}}={{v}_{2}},~{{u}_{3}}={{v}_{3}}\).
II) Se \(u=\left( {{u}_{1}},{{u}_{2}},{{u}_{3}} \right)\) e \(v=\left( {{v}_{1}},{{v}_{2}},{{v}_{3}} \right)\) são paralelos, então \(u~=~\alpha v\) e representamos o paralelismo por \(u~//~v\).
III) O módulo do vetor \(v=\left( {{v}_{1}},{{v}_{2}},{{v}_{3}} \right)\) é dado por \(\left| v \right| = \sqrt{{{v}_{1}}^{2}+{{v}_{2}}^{2}+{{v}_{3}}^{2}}\).
A operação de módulo é realizada para a obtenção do valor do comprimento de um vetor \(v\).
Exemplo 3: Vamos determinar o módulo do vetor \(v~=\left( 4,3 \right)\)
Solução: O módulo de \(\left| v \right|=\sqrt{{{4}^{2}}+{{3}^{2}}}=\surd \left( 16+9 \right)=\surd 25=5\).
Ou seja, o comprimento do vetor \(v\) é de 5 unidades de comprimento. Observe na Figura a seguir que o comprimento do vetor \(v\) é calculado através do teorema de Pitágoras, o que justifica a fórmula do módulo de um vetor:
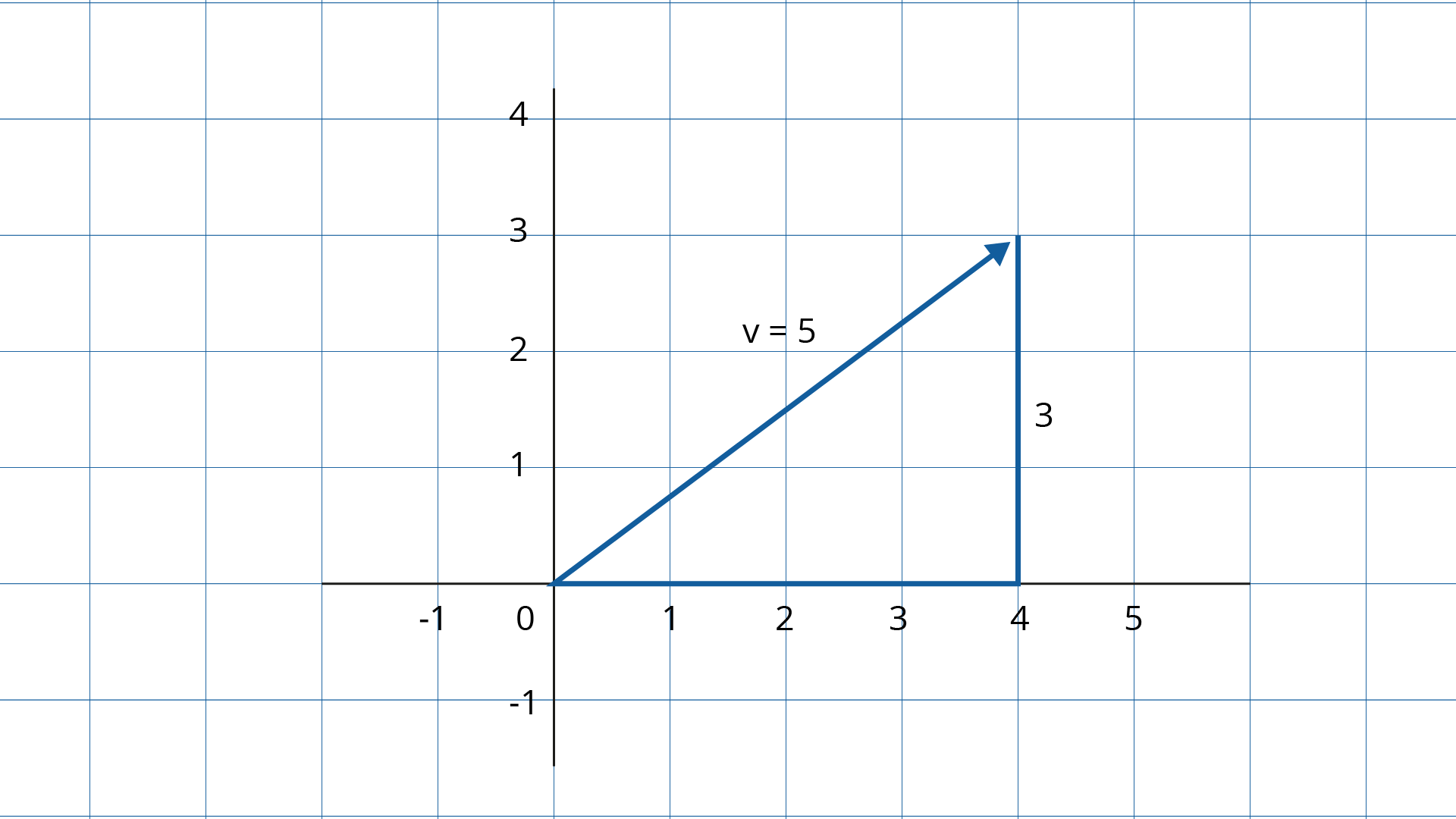
Devemos ficar atentos que o módulo do vetor sempre é um número positivo, pois indica um comprimento. Por exemplo, se os vetores têm componentes \(v=\left( -4,3 \right)\) o módulo continua sendo 5.
Vetores Unitários (versores)
Vetor é unitário quando seu módulo é igual a 1. Todo vetor que não seja unitário pode ser transformado em unitário por meio de um processo chamado de normalização, que é dada pela seguinte fórmula \(\hat{v}=v/\left| v \right|~\)
Existem vetores unitários especiais, que são \(\hat{i}=\left( 1,0,0 \right)\), \(\hat{j}=\left( 0,1,0 \right)\) e \(\hat{k}=\left( 0,0,1 \right)\). Para o caso bidimensional, teremos apenas \(\hat{i}=\left( 1,0 \right)\), \(\hat{j}=\left( 0,1 \right)\). Qualquer vetor bidimensional ou tridimensional pode ser escrito como combinação linear desses vetores como mostrado nos exemplos abaixo:
\(\left( 2,3 \right)=2.\left( 1,0 \right)+3.\left( 0,1 \right)=2\hat{i}+3\hat{j}\) e
\(\left( 2,3,4 \right)=2.\left( 1,0,0 \right)+3.\left( 0,1,0 \right)+4.\left( 0,0,1 \right)=2\hat{i}+3\hat{j}+4\hat{k}\).
A utilização dos vetores unitários é de muita importância para a representação de vetores como mostraremos na próxima seção.
Dado o vetor w=(3,2,5), determinar os números a e b de modo que os vetores \(u=\left( 2,1,4 \right)\) e \(v=~\left( a,6,b \right)+2w~\) sejam paralelos. Marque a opção referente à resposta abaixo.
Dica: lembre-se que dois vetores paralelos têm suas coordenadas proporcionais.
Vamos estudar, a partir de agora, as operações matemáticas de produto entre vetores. As operações que serão vistas são: produto escalar e produto vetorial. Em seguida, estudaremos as aplicações dessas operações, como na determinação de ângulo entre vetores, ortogonalidade e cálculo de área de paralelogramos.
Vamos definir, agora, um produto entre dois vetores, cujo resultado final é um escalar, por isso ele é chamado de produto escalar . Sejam \(u=\left( {{u}_{1}},{{u}_{2}},{{u}_{3}} \right)\) e \(v=\left( {{v}_{1}},{{v}_{2}},{{v}_{3}} \right)\) dois vetores, o produto escalar entre \(u\) e \(v\), representado por \(u.v\) (lê-se \(u\) escalar \(v\)) é definido como
\[u.v={{u}_{1}}.{{v}_{1}}+{{u}_{2}}.{{v}_{2}}+{{u}_{3}}.{{v}_{3}}\]
Exemplo 3: Dados os vetores \(u=\hat{i}-5\hat{j}+8\hat{k}\) e \(v=4\hat{i}-2\hat{j}-\hat{k}\), calcule o produto escalar de \(u\) por \(v\).
Solução: \(~u.v=1.\left( 4 \right)+\left( -5 \right).\left( -2 \right)+8.\left( -1 \right)=4+10-8=6\)
Observe que o resultado é um escalar e não um vetor.
As propriedades do produto escalar são as seguintes: dados quaisquer vetores \(u,~v\) e \(w\) e um escalar real \(\alpha \)
Definição Geométrica do Produto Escalar
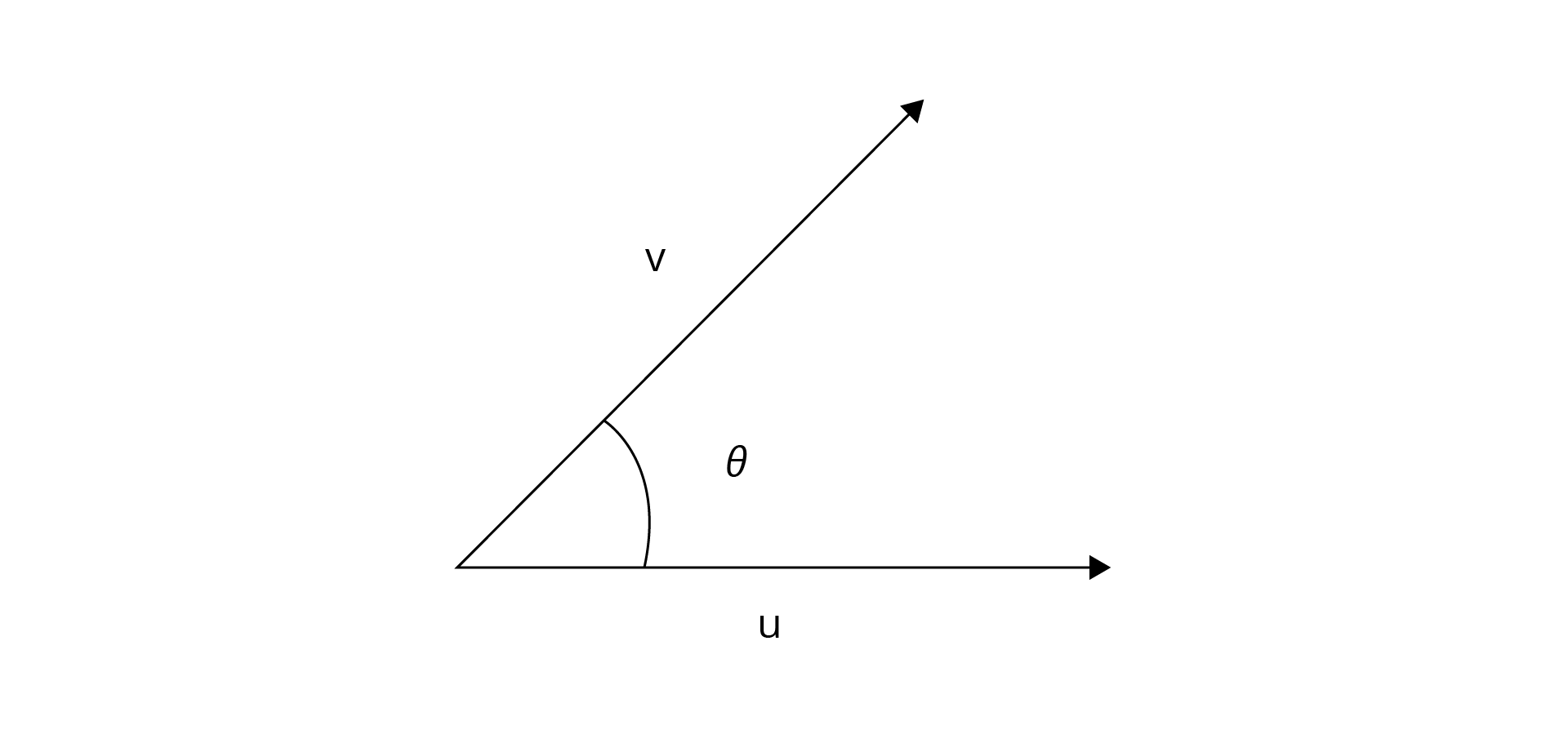
O produto escalar nos dá algumas relações entre os vetores, uma delas é o ângulo entre dois vetores. Como mostrado na figura 1.10 se u e v são vetores não nulos e 𝜽 o ângulo entre eles, então, o produto escalar de u por v nos diz que
\[u.v~=~\left| u \right|.\left| v \right|.cos\left( \theta \right)~~~~~~(1)\]
onde \(0{}^\text{o}~\theta ~~~180{}^\text{o}\).
Através da definição dada pela equação (1) podemos calcular o ângulo θ entre dois vetores. Neste caso, isolamos o cosseno do ângulo na equação e obtemos:
\[cos\theta =\frac{u.v}{\left| u \right|\left| v \right|}~~~~~~(2)\]
Exemplo 4: Considerando os vetores \(u=\left( 1,1-1 \right)~\) e \(v=\left( 2,-1,0 \right)\), calcular o ângulo entre os dois vetores \(u\) e \(v\).
\[cos\theta =\frac{\left( 1,1,-1 \right).\left( 2,-1,0 \right)}{\sqrt{{{1}^{2}}+{{1}^{2}}+{{\left( -1 \right)}^{2}}}\sqrt{{{2}^{2}}+{{\left( -1 \right)}^{2}}}}\]
\[cos\theta =\frac{2-1}{\sqrt{3}\sqrt{5}}=0,26\]
\[\theta =arc\cos \left( 0,26 \right)={{75}^{0}}\]
Uma observação que podemos fazer será quando \(u.v~>~0\) o ângulo θ será agudo. Se \(u.v~<~0\), o ângulo θ será obtuso. Por fim, se \(u.v~=~0\), o ângulo será reto.
Outro conceito muito importante será o de ângulos diretores, por exemplo, como mostrado na figura 1.11.
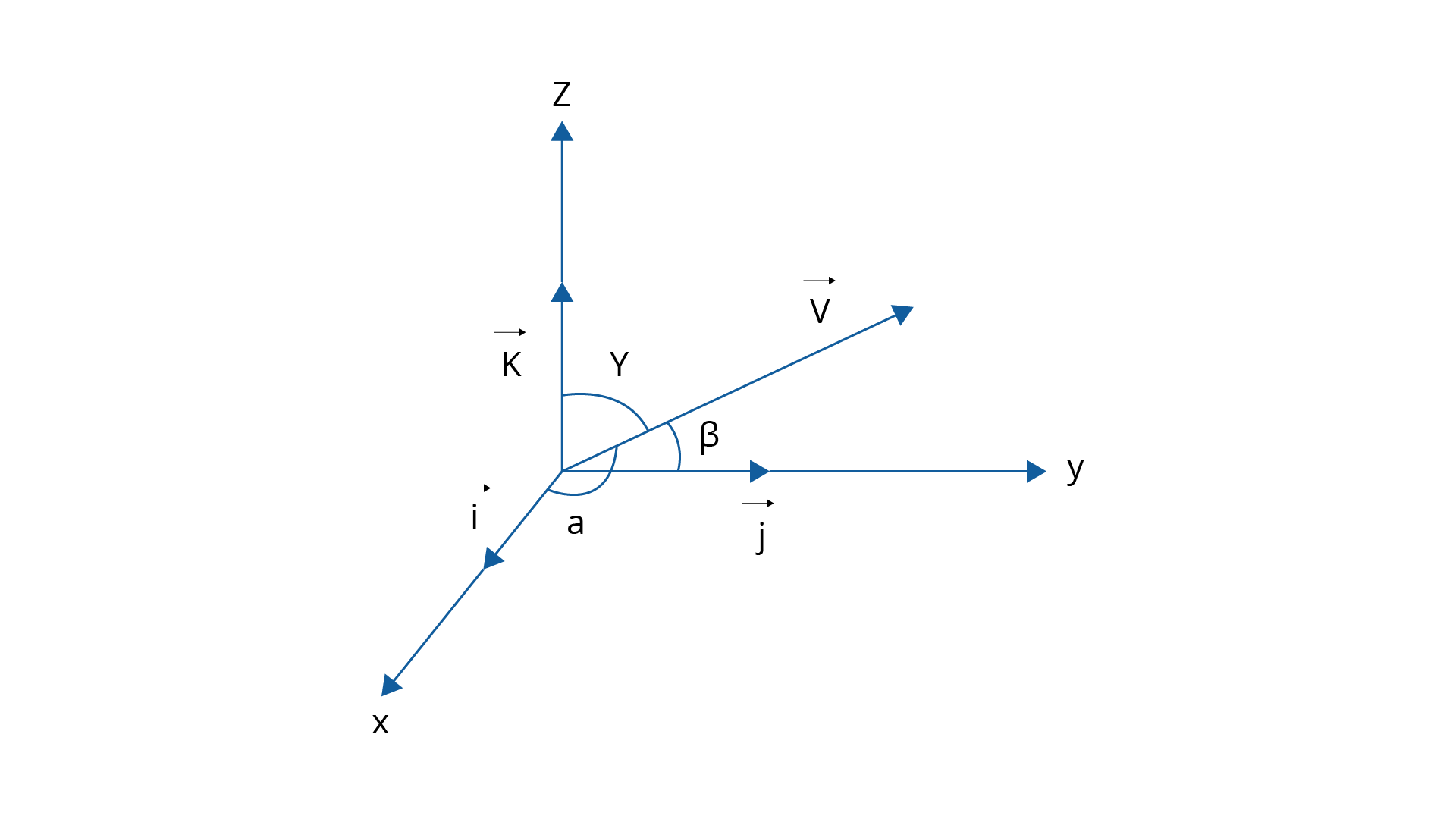
Os ângulos diretores do vetor \(v\) dado pelas componentes \(\left( x,y,z \right)\) são os ângulos que o vetor forma com os eixos coordenados. Os cossenos diretores são os cossenos dos ângulos diretores que são calculados usando a definição da equação (2):
\[cos\alpha =\frac{\left( x,y,z \right).\left( 1,0,0 \right)}{\left| v \right|\left| {\hat{i}} \right|}=\frac{x}{\left| v \right|}\]
\[cos\beta =\frac{\left( x,y,z \right).\left( 0,1,0 \right)}{\left| v \right|\left| {\hat{j}} \right|}=\frac{y}{\left| v \right|}\]
\[cos\gamma =\frac{\left( x,y,z \right).\left( 0,0,1 \right)}{\left| v \right|\left| {\hat{k}} \right|}=\frac{z}{\left| v \right|}\]
Uma importante propriedade que encontramos com as definições dos cossenos diretores são:
\[co{{s}^{2}}\alpha +co{{s}^{2}}\beta +co{{s}^{2}}\gamma =1\]
Exemplo 5: Calcule os ângulos diretores do vetor \(v=\left( 1,-1,0 \right)\).
Primeiramente, vamos calcular o módulo do vetor \(v\):
\[v=\sqrt{{{1}^{2}}+{{\left( -1 \right)}^{2}}+{{0}^{2}}}=\sqrt{2}.\]
Usamos depois as definições dos cossenos diretores:
\[cos\alpha =\frac{x}{\left| v \right|}=\frac{1}{\sqrt{2}}\to \alpha ={{45}^{0}}\]
\[cos\beta =\frac{y}{\left| v \right|}=-\frac{1}{\sqrt{2}}\to \beta ={{135}^{0}}\]
\[cos\gamma =\frac{z}{\left| v \right|}=\frac{0}{\sqrt{2}}\to \gamma ={{0}^{0}}.\]
Através da definição do produto escalar podemos verificar que dois vetores são ortogonais quando o produto escalar for nulo. Lembrando que dois vetores ortogonais têm um ângulo de 90º entre eles.
Exemplo 6: Considere dois vetores \(u=\left( a,-2 \right)\) e \(v=\left( 5,6 \right)\). Calcule o valor de a para que os dois vetores u e v sejam ortogonais.
\[\left( a,-2 \right).\left( 5,6 \right)=5a-12=0\to a=-12/5\]
Aplicações na parte computacional
: O uso de vetores na parte computacional é de muita importância, pois na computação gráfica as posições de um objeto no espaço são representadas por vetores. Nessa parte, para que um objeto translade ou rotacione será aplicada uma matriz neste vetor posição. Entraremos em detalhes nessa parte nas unidades II e III.
Agora que aprendemos sobre a soma de vetores e produto escalar vamos aplicar esse conceito na seguinte atividade:
Considere os seguintes vetores \(u=\left( 3,-1 \right)\), \(v=\left( 4,5 \right)\) e \(~w=\left( 3,-1 \right)\).
Determine o valor da seguinte operação \(u.\left( v+w \right)\).
Outro tipo de multiplicação de vetores chama-se produto vetorial. Nesse caso seria o produto de vetores em três dimensões R3. O módulo do resultado do produto vetorial pode ser escrito como:
\[\left| uxv \right|~=~\left| u \right|.\left| v \right|.sen\left( \theta \right)~~~~~~(3)\]
Podemos ver na equação (3) que neste caso usamos a função trigonométrica \(sen\left( \theta \right)\) o que implica que o módulo do produto vetorial será máximo quando o ângulo for 90º. Uma das aplicações do produto vetorial dentro da física será no contexto do cálculo do Momento da Força.
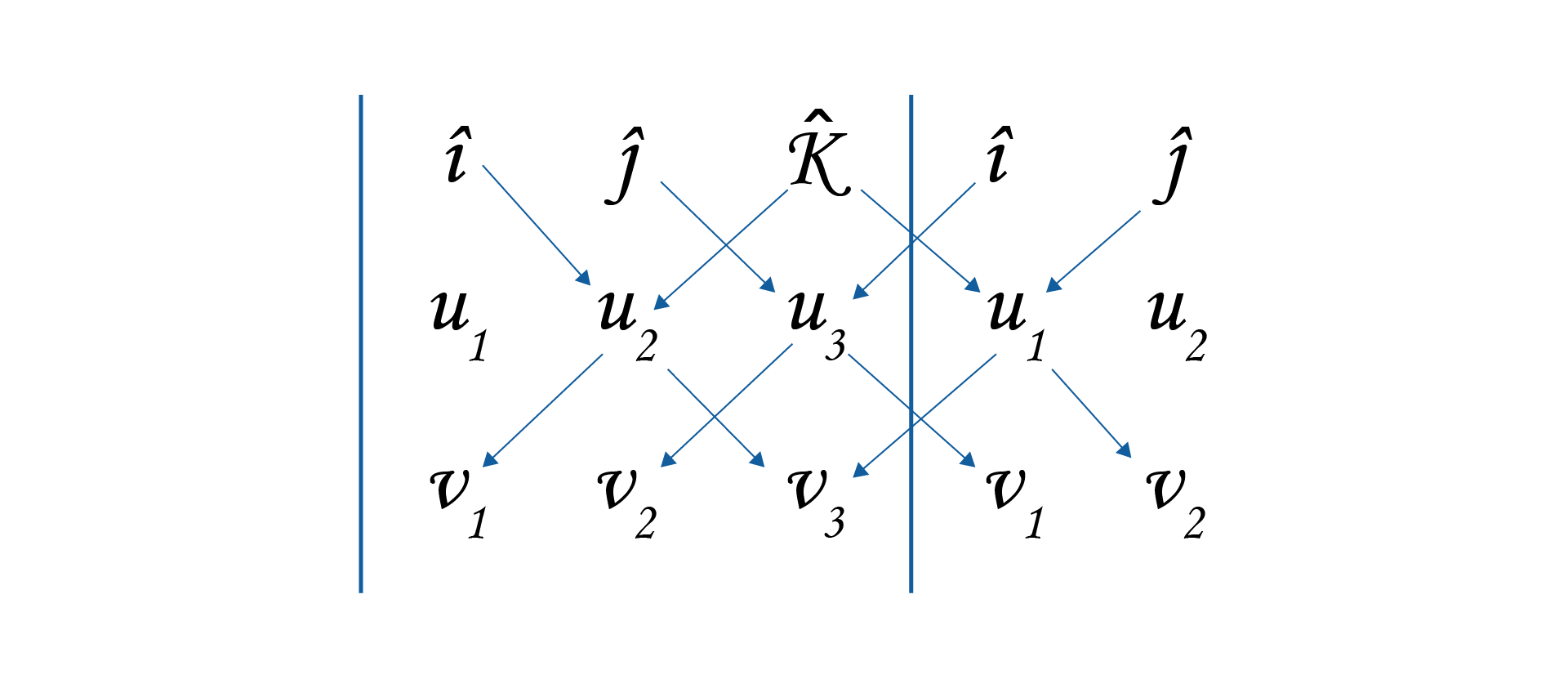
Além disso outro ponto a se destacar seria que o produto vetorial fornece como resultado outro vetor. Umas das maneiras para esse cálculo seria usar o determinante. Por exemplo, se temos dois vetores \(u=\left( {{u}_{1}},~{{u}_{2}},{{u}_{3}} \right)\) e \(v=\left( {{v}_{1}},{{v}_{2}},{{v}_{3}} \right)\) o produto vetorial entre esses vetores será dado por:
\[\left| \begin{matrix} {\hat{i}} & {\hat{j}} & {\hat{k}} \\ {{u}_{1}} & {{u}_{2}} & {{u}_{3}} \\ {{v}_{1}} & {{v}_{2}} & {{v}_{3}} \\ \end{matrix} \right|~~~~~~(4)\]
Nessa situação o determinante dessa matriz será o resultado do produto vetorial. O cálculo desse determinante vai ser feito através da repetição das duas primeiras colunas e multiplicando cruzado. Esse esquema pode ser visto na figura 1.12. A multiplicação que vai da esquerda para direita consideramos positiva e da direita para esquerda negativa.
Mais precisamente se desenvolvermos esse cálculo encontraremos:
\[\hat{i}\left( {{u}_{2}}{{v}_{3}}-{{u}_{3}}{{v}_{2}} \right)+\hat{j}\left( {{u}_{3}}{{v}_{1}}-{{u}_{1}}{{v}_{3}} \right)+\hat{k}\left( {{u}_{1}}{{v}_{2}}-{{u}_{2}}{{v}_{1}} \right).~~~~(5)\]
Exemplo 7: Calcule o produto vetorial \(u~x~v\). Considere que \(u=\left( 1,2,3 \right)\) e \(v=\left( 0,1,-1 \right)\).
O resultado do produto vetorial será dado por:
\[u~x~v~=\hat{i}\left( 2.\left( -1 \right)-3.1 \right)+\hat{j}~\left( 1.\left( -1 \right)-3.0 \right)+\hat{k}\left( 1.1-2.0 \right)=-5\hat{i}+1\hat{j}+1\hat{k}.\]
O módulo desse vetor será dado por:
\[\left| u~x~v \right|=\sqrt{{{\left( -5 \right)}^{2}}+{{1}^{2}}+{{1}^{2}}=}\sqrt{27}.\]
Finalizando os conceitos de produto vetorial e escalar podemos deduzir algumas relações entre essas operações:
I. \(~u.\left( u~x~v \right)=0\)
II. \(v~\left( u~x~v \right)=0\)
III. \(~u~x~\left( v~x~w \right)=\left( u.w \right)v~-~\left( u.v \right)w\)
Consideremos três vetores u, v e w no espaço tridimensional. Desse modo, o produto misto desses três vetores será dado por:
\[u.\left( v~x~w \right)~~~~~~~~(6)\]
Na forma matricial teremos:
\[\left| \begin{matrix} {{u}_{1}} & {{u}_{2}} & {{u}_{3}} \\ {{v}_{1}} & {{v}_{2}} & {{v}_{3}} \\ {{w}_{1}} & {{w}_{2}} & {{w}_{3}} \\ \end{matrix} \right|\]
Assim para ter o resultado do produto misto devemos calcular o determinante.
Exemplo 8: Calcular o produto misto dos vetores \(u=~\left( 3,2,-1 \right),~v=\left( 0,2,-3 \right)~\) e \(w=\left( 2,6,-7 \right).~\)
Resolução: Colocando na forma matricial teremos:
\[\left| \begin{matrix} 3 & 2 & -1 \\ 0 & 2 & -3 \\ 2 & 6 & -7 \\ \end{matrix} \right|\]
O resultado do determinante desta matriz é 4.
\[u.\left( v~x~w \right)=4.\]
Uma das aplicações do produto misto seria o cálculo do volume de um paralelepípedo. Considerando que os lados do paralelepípedo sejam dados por vetores u, v e w, assim o volume será dado por:
\[V~=~u.\left( v~x~w \right).~~~~~~(7)\]
Usando essa definição considere que \(u=\left( 2,-6,-2 \right)\), \(v=\left( 0,4,-2 \right)\) e \(w=\left( 2,2,-4 \right)\), calcule o volume do paralelepípedo.
Nesta seção iremos apresentar as condições para a determinação de uma reta e um plano. Iremos identificar e escrever equações de retas nas formas vetorial, paramétrica e simétrica, escrever a equação geral do plano e verificar se um dado ponto pertence a uma reta ou plano.
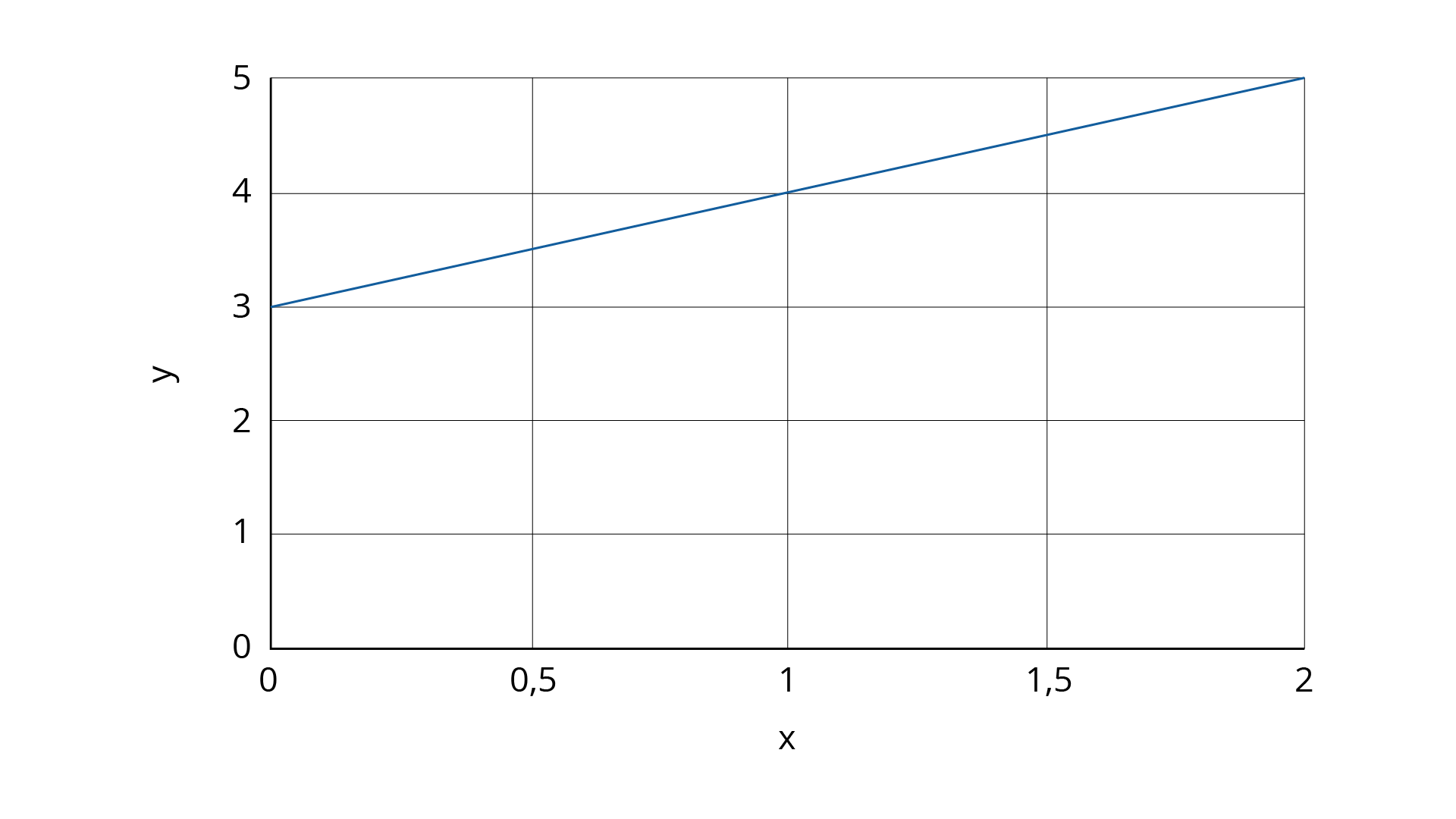
As retas podem estar em planos (R²) ou no espaço (R³). Por exemplo, como mostrado na figura 1.13 a reta está no plano (x,y). No caso temos os pontos (0,3) e (2,5).
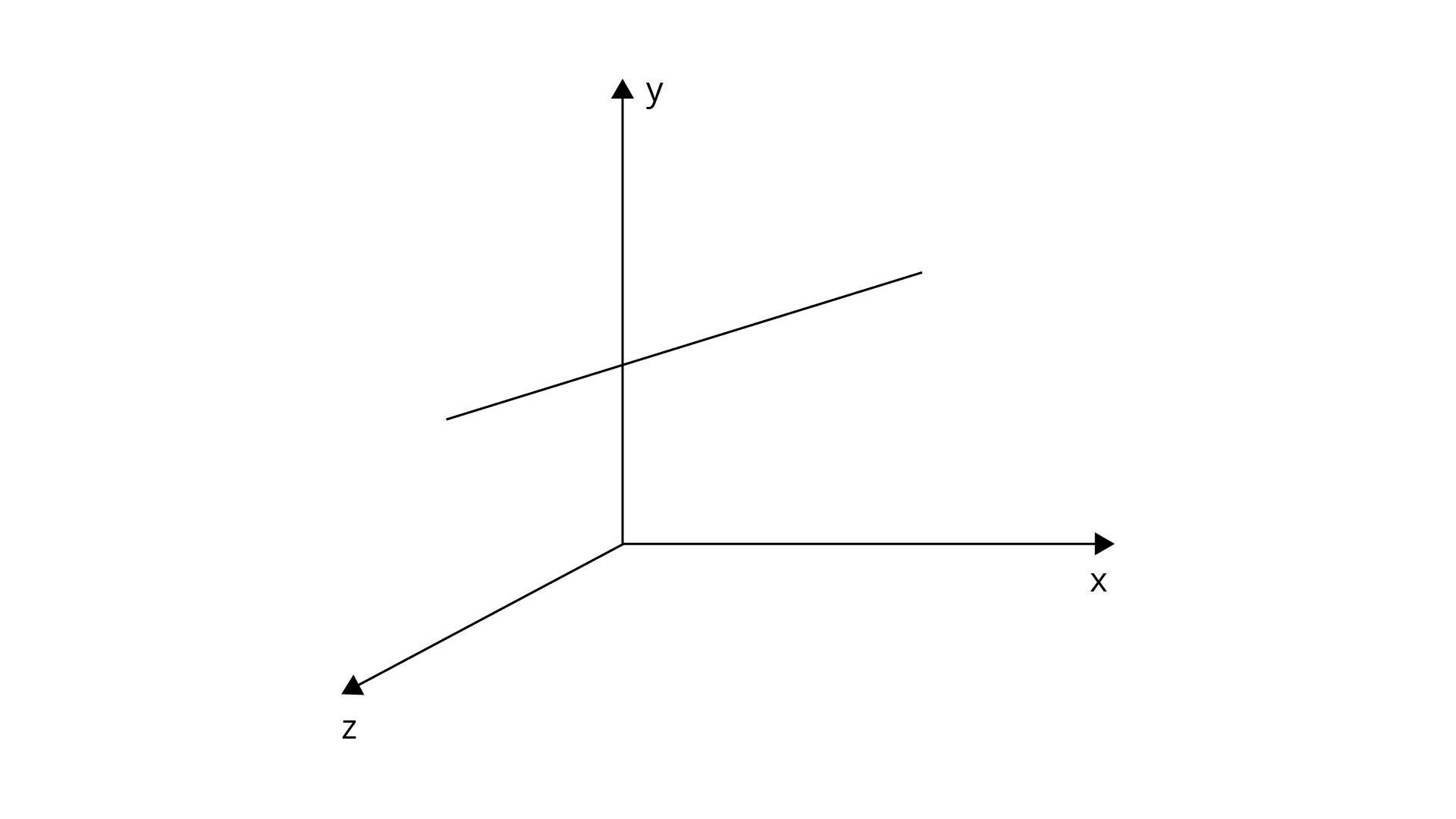
As retas no espaço possuem pontos com três coordenadas (x,y,z). Por exemplo na figura 1.14 temos que os pontos serão representados por três pontos.
Para determinar a equação da reta em um plano (x,y) usaremos a equação da reta:
\[y-{{y}_{0}}=m~\left( x-{{x}_{0}} \right)~~~~~~(8)\]
Onde m é o coeficiente angular da reta:
\[m=\frac{{{y}_{f}}-{{y}_{0}}}{{{x}_{f}}-{{x}_{0}}}.~~~~~~(9)\]
Para aplicar as equações acima vamos considerar o exemplo abaixo:
Exemplo 9: Escrever a equação da reta que passa pelos pontos \(\left( 0,0 \right)\) e \(\left( 2,3 \right)\).
Resolução: Primeiramente devemos calcular o coeficiente angular da reta:
\[m=\frac{3-0}{2-0}=\frac{3}{2}\]
A equação da reta vai ser dada por:
\[y-0=3/2\left( x-0 \right)\]
\[y=\frac{3}{2}x.\]
Uma reta pode ser determinada conhecendo-se dois de seus pontos ou conhecendo um de seus pontos e sua inclinação. Por exemplo, consideramos a seguinte equação vetorial:
\[AP=~tv\]
\[\left( x,y,z \right)=\left( {{x}_{0}},{{y}_{0}},{{z}_{0}} \right)+t\left( a,b,c \right).~~~~~~~(10)\]
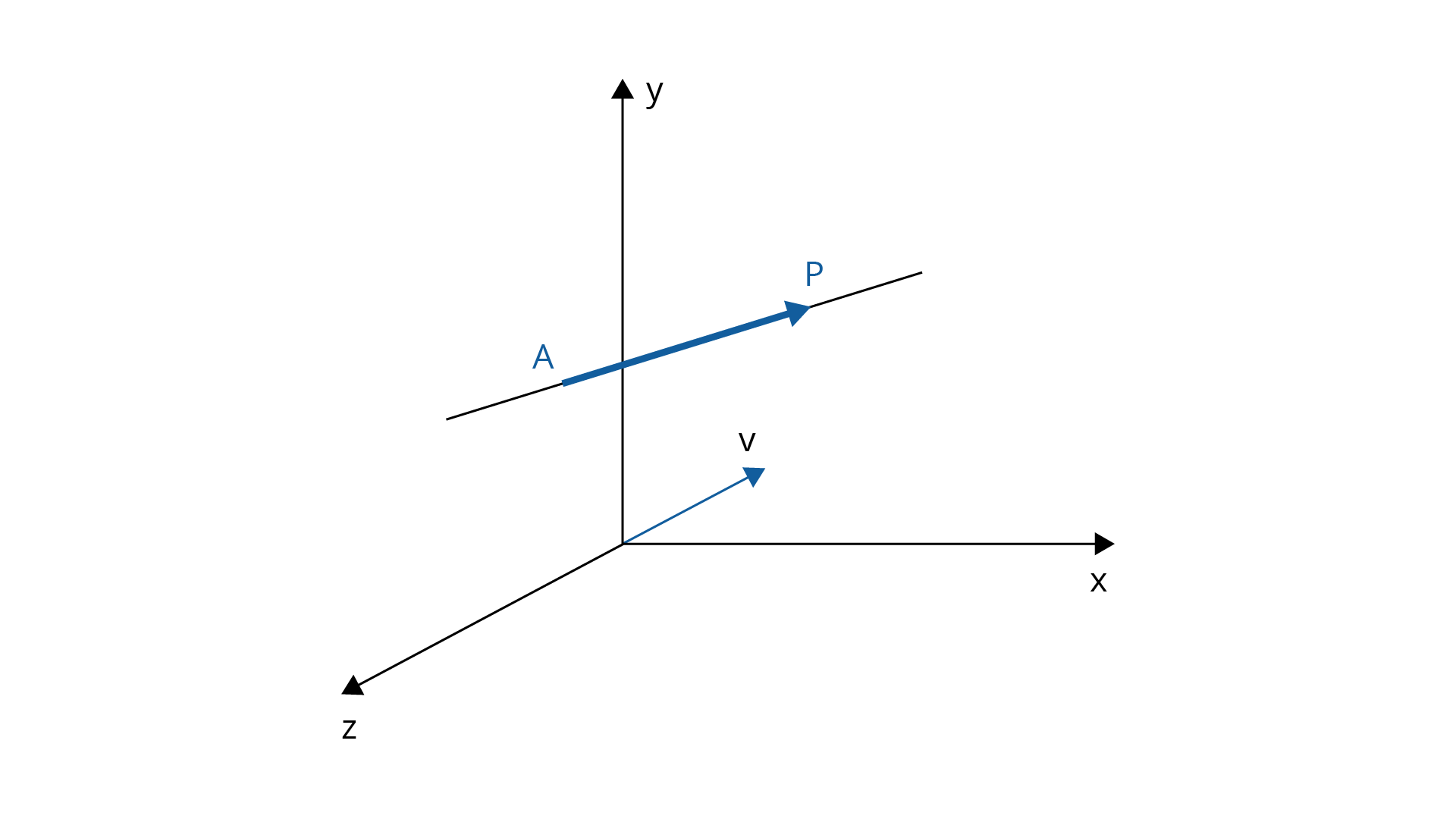
Exemplo 10: Determine a equação vetorial da reta r que passa pelo ponto A \(\left( 1,-1,4 \right)\) e tem a direção do vetor \(v=\left( 2,3,2 \right)\).
Resolução: Usando a equação 10 encontraremos
\[\left( x,y,z \right)=\left( 1,-1,4 \right)+t\left( 2,3,2 \right)~~~\]
Para obter as coordenadas de diversos pontos da reta temos que atribuir valores reais para o parâmetro t:
\[t=0~\to \left( x,y,z \right)=~\left( 1,-1,4 \right)\]
\[t=1\to \left( x,y,z \right)~=~\left( 3,2,6 \right)\]
\[t=2\to \left( x,y,z \right)~=~\left( 5,5,8 \right)\]
Equação paramétrica da reta no espaço
O conceito de equação paramétrica tem sua importância, quando precisamos determinar as coordenadas de um ponto na reta r, do qual sabemos uma de suas coordenadas. Para esse desenvolvimento considere a equação vetorial abaixo:
\[\left( x,y,z \right)=\left( {{x}_{0}},{{y}_{0}},{{z}_{0}} \right)+t\left( a,b,c \right)\]
\[\left( x,y,z \right)=\left( {{x}_{0}}+at,{{y}_{0}}+bt,{{z}_{0}}+ct \right)\]
A partir das relações acima podemos obter as equações paramétricas:
\[x={{x}_{0}}+at\]
\[y={{y}_{0}}+bt\]
\[z={{z}_{0}}+ct.\]
Para aplicação do conjunto de equações acima faremos um exemplo:
Exemplo 11: Determine a equação paramétrica da reta que passa pelo ponto \(A\left( 3,-4,2 \right)\) e é paralela ao vetor \(v=\left( 2,1,-3 \right)\).
Resolução: Neste caso usamos o conjunto de equações paramétricas e encontramos:
\[x=3+2t~\]
\[y=-4+1t\]
\[z=2-3t.\]
Vamos supor dois pontos B e C da reta r, com os parâmetros \(t=2\) e \(t=3\) obtemos:
\[x=3+2.2=7,~~x=3+2.3=9\]
\[y=-4+1.2=-2,~~y=-4+1.3=-1\]
\[z=2-3.2=-4,~~~~~~~~~~~~z=2-3.3=-7.\]
Encontramos os seguintes pontos: \(B=\left( 7,-2,-4 \right)\) e \(C=\left( 9,-1,-7 \right)\).
Para obter as equações simétricas da reta podemos isolar o parâmetro t das equações paramétricas. Por exemplo, considere o conjunto de equações:
\[x=3+2t~\]
\[y=-4+1t\]
\[z=2-3t.\]
Se isolarmos o parâmetro t das equações e igualarmos cada um encontramos:
\[\left( x-3 \right)/2=y+4=\left( 2-z \right)/3.\]
A Física lida com diversos conjuntos de grandezas. Para saber mais sobre vetores e aplicações, bem como sobre representações algébricas e gráficas, propriedades e definições, acesse o material disponível na íntegra:
Fonte: Elaborado pelo autor.
Para determinação da equação geral do plano consideramos a figura 1.16. Seja um ponto A (x0,y0,z0) que pertence a um plano 𝝰 e n = (a,b,c) um vetor normal ao plano. O plano 𝝰 pode ser definido como um conjunto de todos os pontos P(x,y,z) do espaço tais que o vetor AP é ortogonal a n . O ponto P pertence a um determinado plano se, e somente se:
\[n.AP=0\]
Lembrando que a operação acima é o produto escalar entre dois vetores. Se levarmos em conta isso encontramos a equação geral do plano:
\[ax+by+cz+d=0\]
Onde \(d=-\left( a{{x}_{0}}+b{{y}_{0}}+c{{z}_{0}} \right)\).
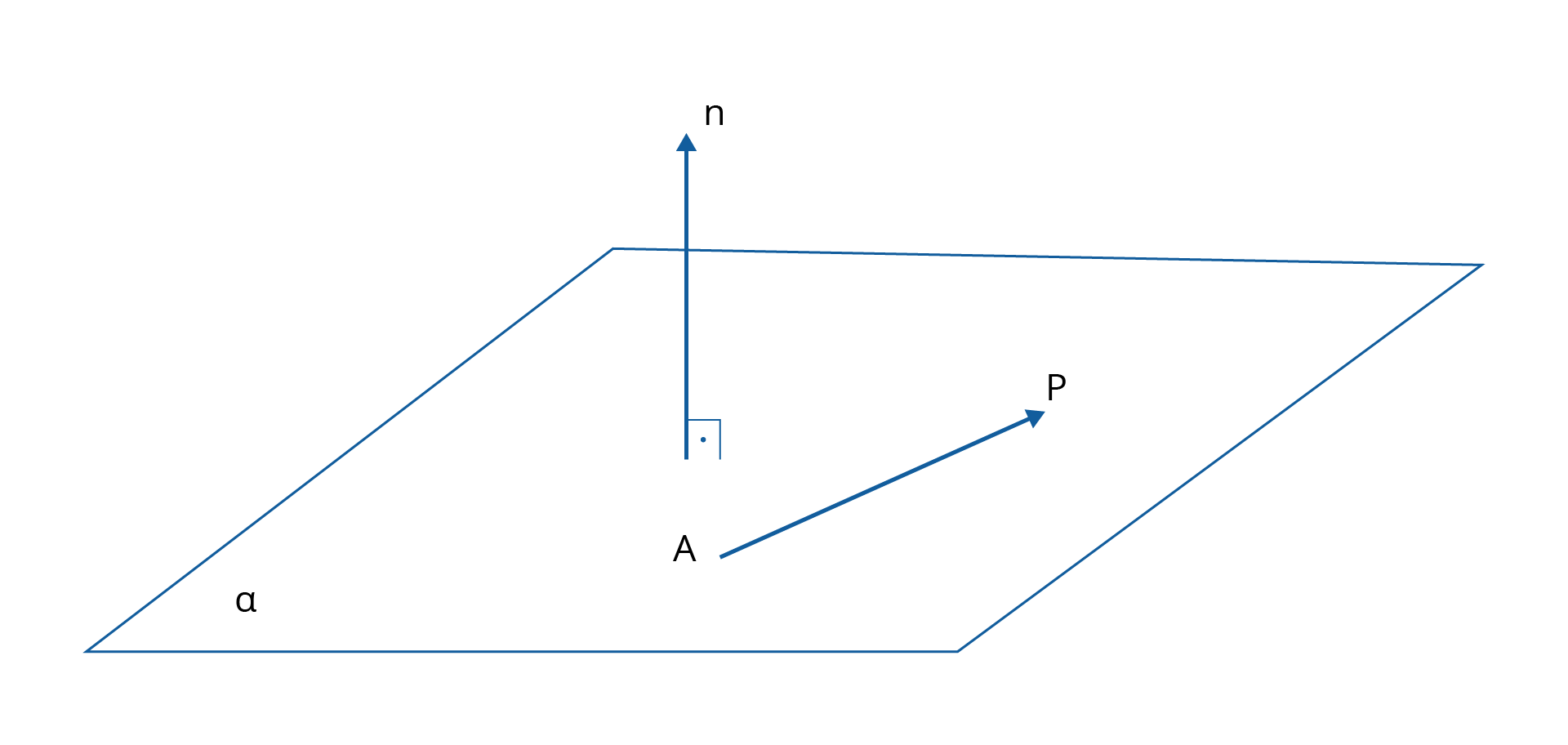
Outro conceito importante será que o vetor \(n\) ortogonal ao plano será ortogonal a qualquer outro vetor representado nesse plano.
Exemplo 12: Determine a equação paramétrica da reta que passa pelo ponto \(A\left( 3,-4,2 \right)\) sabendo que o vetor \(v=\left( 2,1,-3 \right)\) é normal ao plano.
Resolução: \(AP.v=0~\to ~\left( x-3,~y+4,~z-2 \right).\left( 2,1,-3 \right)=0~\to 2x-6+y+4-3z+6=0\to 2x+y-3z+4=0\).
Um engenheiro ao projetar uma estrutura, seja uma ponte, seja uma casa, faz seus projetos utilizando cálculo estrutural, o qual envolve um conjunto de vetores força em seu modelamento matemático. São inúmeras forças que agem nos pontos da estrutura e essas forças são equacionadas de tal forma que a soma de vetores seja zero. Reflita.
Fonte: Adaptado de Hibbeler (2011).
Dado um plano 𝞹 de equação geral:
\[ax+by+cz=d\]
e uma equação paramétrica da reta r:
\[\left( x,y,z \right)=\left( {{x}_{0}},{{y}_{0}},{{z}_{0}} \right)+t\left( {{v}_{1}},{{v}_{2}},{{v}_{3}} \right).\]
Nessa situação a reta e o plano serão transversais se:
\[\left( a,b,c \right).\left( {{v}_{1}},{{v}_{2}},{{v}_{3}} \right)\ne 0.\]
Se a reta r não for transversal ao plano 𝞹, teremos:
A reta r é paralela ao plano 𝞹 de forma disjunta do plano.
Ou a reta r está contida no plano 𝞹.
Exemplo 13: Mostre que a reta abaixo é paralela ao plano.
Equação da reta \(\left( x,y,z \right)=\left( -2,1,-5 \right)+t\left( 3,-4,4 \right)\)
Equação do plano \(4x-3y-6z-5=0\)
Resolução:
Vetor diretor da reta: \(v=\left( 3,-4,4 \right)\)
Vetor normal ao plano: \(n=\left( 4,-3,-6 \right)\)
Usando o produto escalar entre estes dois vetores teremos:
\[\left( 3,-4,4 \right).\left( 4,-3,-6 \right)=12+12-24=0\]
Desse modo, a reta é paralela ao plano.
Dois planos podem ser paralelos, transversais e coincidentes. Por exemplo, sejam dois planos:
\[{{\pi }_{1}}:~{{a}_{1}}x+{{b}_{1}}y+{{c}_{1}}z={{d}_{1}}\]
\[{{\pi }_{2}}:~{{a}_{2}}x+{{b}_{2}}y+{{c}_{2}}z={{d}_{2}}\]
\({{\pi }_{1}}\) e \({{\pi }_{2}}\) são planos paralelos se os seus vetores normais forem paralelos. Contudo, se:
\[\left( {{a}_{1}},{{b}_{1}},{{c}_{1}},{{d}_{1}} \right)=\lambda \left( {{a}_{2}},{{b}_{2}},{{c}_{2}},{{d}_{2}} \right)\]
onde \(\lambda \) é uma constante de proporcionalidade, temos que os planos são coincidentes. Se não existe a proporcionalidade acima os planos são paralelos distintos.
No caso se \({{\pi }_{1}}\) e \({{\pi }_{2}}\) forem transversais temos que vetores normais não são paralelos. Ou seja, não existe a proporcionalidade entre \(\left( {{a}_{1}},{{b}_{1}},{{c}_{1}},{{d}_{1}} \right)~\) e \(\left( {{a}_{2}},{{b}_{2}},{{c}_{2}},{{d}_{2}} \right)\). Se os planos forem transversais, então a reta r determinada pela interseção dos dois planos deve ser perpendicular aos vetores normais \(\left( {{a}_{1}},{{b}_{1}},{{c}_{1}} \right)~\) e \(\left( {{a}_{2}},{{b}_{2}},{{c}_{2}} \right)\).
Determine a equação paramétrica que passa pelos pontos \(A\left( 1,-2,-3 \right)\) e \(B=\left( 3,1,-4 \right)\). Escolha o ponto A como ponto r. Marque a opção referente à solução abaixo:

Autor : Mark Zegarelli
ISBN :9788550805740
Comentário : Uma excelente leitura para você que está iniciando seu curso e está precisando de uma boa base para matemática básica. Esses conceitos de matemática básica lhe ajudarão não só neste curso, mas em outros também.
Ano : 2001
Comentário : Esse filme aborda a história do matemático John Nash. Esse filme mostra como o matemático usa suas habilidades para resolver problemas abstratos.
Ao término deste capítulo você terá feito grandes progressos em conceitos de álgebra linear. O entendimento da diferença entre grandezas vetoriais e escalares são de muita importância para formação dos conceitos básicos de matemática.
Você também aprendeu as principais operações vetoriais, a saber: soma, produto escalar e produto vetorial.
Além disso, você teve um contato com um outro importante tópico da matemática: equações de reta e plano. Com esse tópico você aprendeu como se encontra uma equação de reta conhecendo alguns pontos que pertencem a essa reta. Esses fundamentos serão aplicados em outras disciplinas como cálculo numérico, estatística etc.
HIBBELER, R. C. Estática : mecânica para engenharia. 12. ed. São Paulo: Pearson Prentice Hall, 2011.
USP. Vetores . Centro de Ensino e Pesquisa Aplicada - e-Física, 2007. Disponível em: http://efisica.if.usp.br/mecanica/universitario/vetores/ . Acesso em: 24 nov. 2019.
WINTERLE, P. Vetores e geometria analítica . São Paulo: Pearson Makron Books, 2000.