Geoprocessamento
Evolução e aplicações dos sistemas GPS


Os sistemas de posicionamento por satélite, vão além do GPS. Nesta unidade, abordaremos sobre os sistemas GPS, além da estrutura de sistemas de informações geográficas e seus tipos de dados. Veremos também os fundamentos básicos do Sensoriamento Remoto, a teoria, o espectro eletromagnético, o comportamento dos alvos, as características das imagens de satélite multiespectrais e a composição das bandas. Isso posto, seremos capazes de entender os usos dos sistemas de posicionamento por satélite e as diferenças nos dados geoespaciais utilizados nos SIGs. Compreenderemos a fundamentação teórica do Sensoriamento Remoto e seus diversos usos, desde mapeamentos de vegetação, passando por expansão urbana e outros, como dados climáticos, relevo e etc.
No ano 1973, o Departamento de Defesa dos Estados Unidos desenvolveu um sistema de posicionamento por satélite para fins militares, nascia o NAVSTAR GPS ( Navigation Satellite with Time And Ranging - Global Positioning System ) que passou por dois períodos de testes, um até 1979 e o outro até 1985. Na terceira fase, o departamento produziu os aparelhos de GPS e terminou a rede com 24 satélites. A utilização inicial do GPS foi para facilitar os deslocamentos de tropas, a localização de tropas inimigas e a navegação de alta precisão para transporte militar. O GPS foi testado na Guerra do Golfo (1990-1991), facilitando a locomoção das tropas pelo deserto. Em 1994, o sistema GPS foi totalmente finalizado e foi possível integrá-lo às operações de levantamentos terrestres (CARVALHO; ARAÚJO, 2009). Atualmente o GPS é referência quando se trata de Sistema Global de Navegação por Satélite ( Global Navigation Satellite System – GNSS ). Entretanto, ele não é o único sistema ativo, existem pelo menos outros três sistemas conhecidos: GLONASS ( Global Orbiting Navigation Satellite System ), Beidou (Compass) e Galileo.
O GLONASS nasceu em paralelo ao GPS, porém na antiga União da Repúblicas Socialistas Soviéticas (URSS). Ele também possuía como objetivo a área militar e desde 1988 era utilizado pela sociedade civil. Com o fim da URSS, a Federação Russa assumiu o projeto, ele foi finalizado em 1995, mas devido a problemas muitos satélites foram desativados, chegando a possuir apenas 9 dos 25 originais no ano de 2002. Esse sistema passou por modernizações, e em 2010 atingiu o número de 23 satélites em funcionamento (DOMPIERI; SILVA, NOGUEIRA JÚNIOR, 2015).
O Galileo surgiu após a recusa do Estados Unidos de permitir que outros países desenvolvessem o GPS. Assim, a União Europeia decidiu desenvolver um sistema próprio. Entre os anos de 1999 e 2002 ocorreu a fase de definição da arquitetura do sistema e do segmento espacial. Em 2005 o primeiro satélite foi lançado, o projeto previa ao menos 30 satélites em operação (DOMPIERI; SILVA, NOGUEIRA JÚNIOR, 2015).
Por fim, o Beidou ou Compass foi iniciado em 1983, porém seu primeiro satélite foi lançado no ano 2000. A expectativa do Governo Chinês é até 2020 o sistema estar finalizado com 35 satélites em órbita.
Cada sistema de posicionamento global possui características próprias, mas todos seguem algumas regras, por exemplo, para que um sistema seja global são necessários pelo menos 24 satélites. Um receptor na superfície terrestre precisa de no mínimo 4 satélites disponíveis, três são suficientes para determinar as coordenadas e o quarto para determinar o tempo, tendo em vista a diferença nos relógios dos satélites e do receptor. O levantamento das coordenadas determina a posição por meio da latitude, longitude e altitude, e quando comparada por outros métodos de levantamentos topográficos e geodésicos, o sistema por satélite é mais preciso por não necessitar da visualização entre as estações. Um levantamento por satélite pode ser feito em qualquer terreno e em qualquer tipo de clima (DOMPIERI; SILVA, NOGUEIRA JÚNIOR, 2015).
O sistema GPS possui como característica a presença de 24 satélites em órbita média distribuídos em seis planos orbitais igualmente separados e espaçados com quatro satélites em cada um, todos em uma altitude média de 20.200 metros e com inclinação de 55° em relação ao Plano do Equador e com um período orbital de aproximadamente 12 horas siderais. O sistema consegue manter pelo menos quatro satélites disponíveis em qualquer parte do globo a qualquer hora (MONICO, 2008).
Por sua vez, o GLONASS também possui 24 satélites ativos e três de reserva. Eles estão distribuídos em três planos orbitais de 120° e com inclinação de 64,8°, cada um com oito satélites igualmente espaçados. A altitude média é deles é de 19.100 metros, já o período orbital é de 11h15min siderais. Por ter um ângulo de inclinação maior que o do GPS, a constelação do GLONASS pode proporcionar melhor cobertura em altas latitudes. O GLONASS possui de 6 a 11 satélites visíveis em qualquer lugar do planeta (MONICO, 2008).
Já o Galileo prevê 30 satélites, sendo 27 operacionais e 3 de reserva. Ele está a 23.600 km de altitude e com inclinação de 56° em relação ao plano do Equador. O seu período orbital é de 14h4min siderais. Com a disposição dos satélites, os sinais do Galileo mantêm uma boa recepção mesmo em latitudes acima de 75° (DOMPIERI; SILVA, NOGUEIRA JÚNIOR, 2015).
Por fim, o Beidou será composto por 5 satélites geoestacionários e 30 não geoestacionários. Esses últimos se dividem em 3 satélites em órbita geossíncrona e 27 em órbita média. A altitude média é de 35,786 km para os cinco geoestacionários e os três geossíncronos está a 21.528 km para os 27 de órbita média. A inclinação dos satélites não geoestacionários é de 55° em relação ao Plano do Equador. Quando os quatro sistemas estiverem em total funcionamento existirão aproximadamente 120 satélites disponíveis para os usuários de GNSS (LI et al., 2015).
O GPS é um sistema de posicionamento por satélite muito conhecido e quase um sinônimo dessa tecnologia, embora não seja o único. Assinale a alternativa que apresenta quais são os outros três sistemas mais conhecidos.
Os sistemas de informação geográfica (SIGs) são a combinação de recursos humanos (Peopleware) e técnicos (Hardware/Software). Uma velha frase do mundo computacional de um técnico da IBM, George Fuechsel, diz “Garbage in... garbage out” que numa tradução seria “lixo que entra, lixo que saí”. Essa frase é utilizada também nos SIGs, pois se os dados geográficos inseridos forem ruins ou de má qualidade ou errados, o resultado final será ruim ou errado. Não tem como “salvar” um dado ruim, o sistema apenas irá reproduzir aquele erro, então a qualidade dos dados é o que vai determinar o produto final. O início da filtragem de bons dados passa pela estrutura deles mesmos.
Dados SIGs são divididos em duas partes. Os dados espaciais e os dados alfanuméricos. Os dados espaciais são considerados aqueles que podem ser representados espacialmente, ou seja, em uma forma gráfica. Esses dados são divididos em dois tipos de dados os vetoriais e os matriciais (FITZ, 2008).
Os dados vetoriais são uma estrutura gráfica composta por três tipos distintos. Os pontos, as linhas e os polígonos. Os pontos abrangem todas as entidades geográficas que podem ser posicionadas por um único par de coordenadas (x, y). A localização no espaço é feita considerando uma superfície plana (ROSA, 2013). Os pontos podem ser utilizados para uma localização como uma escola, um posto de saúde, uma empresa, um poste de iluminação e etc.
As linhas são na verdade um conjunto de pelo menos dois pontos. Além das coordenadas dos pontos que compõem a linha, deve-se armazenar informações que indiquem o atributo que está associado a aquela linha (ROSA, 2013). Linhas podem representar rodovias, linhas de transmissão de energia elétrica ou telefonia, ferrovias, rios e córregos e etc.
As áreas ou polígonos possuem por objetivo descrever as propriedades topológicas de áreas c, de tal maneira que os atributos associados aos elementos da área representada possam ser manipulados da mesma forma em que um mapa temático analógico. Nesta representação cada elemento tem área, perímetro e formato individualizado (ROSA, 2013). Exemplos de áreas são os vetores que indicam a forma de um município, de uma bacia hidrográfica, as quadras de um bairro e etc.
Esses dados podem ser variados como medições de GPS e topográficos realizados em campo, além de mapas topográficos, pedológicos, geológicos, de divisas municipais, banco de dados com nome de lugares e etc.
Os dados matriciais, também são conhecidos como raster , eles podem ser armazenados em uma estrutura matricial. Esse é um tipo estrutura de dados em que uma matriz com linhas e colunas contendo células, denominadas de pixel. Apresentam um valor z que pode indicar, por exemplo, uma cor ou tom de cinza a ele atribuído. Imagens de satélites, fotografias aéreas digitais e mapas digitalizados, são os exemplos mais comuns de dados raster (FITZ, 2008).
Já os dados alfanuméricos “são dados constituídos por caracteres (letras, números ou sinais gráficos) que podem ser armazenados em tabelas, as quais podem formar um banco de dados” (FITZ, 2008, p. 56). Geralmente são dispostos em tabelas que possuem atributos e que estão vinculados a uma estrutura espacial georreferenciada. Este tipo de dado, geralmente, é utilizado junto de uma estrutura vetorial (FITZ, 2008).
Os dados vetoriais possuem vários formatos. O formato mais utilizado em SIGs é o .shp ( shapefile ). Originalmente, ele foi desenvolvido pela ESRI® e é utilizado no software comercial (pago) ArcGis. Porém, outros softwares também conseguem ler e editar os arquivos Shapefile . Todo arquivo .shp (que é o principal) possui outros dois arquivos o . dbf ( dBASE table ) e .shx ( Index file ). O formato . shp é a geometria do mapa (estrutura espacial). Uma limitação do shapefile é que só é possível conter um tipo de geometria, ou seja, o arquivo é somente pontos, ou linhas, ou polígonos e nunca será híbrido como arquivos . dwg (formato vetorial do tipo CAD), por exemplo.
O formato . dbf armazena os atributos da geometria em formato de tabela e pode contar com dados sobre a população, densidade demográfica, tipo de solos e rochas e etc. Como limitação o nome das colunas no arquivo não podem conter mais de 10 caracteres. Por último, o formato . shx é a ligação entre o . shp e o . dbf . Portanto, são sempre necessários esses três arquivos. Outro arquivo do Shapefile é o .prj, ele foi criado quando se determina os Sistemas geodésico, de coordenadas e a projeção da geometria do mapa.
Os arquivos raster , por serem imagens, utilizam formatos de imagem comuns como o . jpg , . bmp , . png . Geralmente eles utilizam os formatos . tiff e sua variação o Geotiff. A vantagem do Geotiff é a possibilidade de inserir dados geoespaciais como sistema de coordenadas, datum horizontal na imagem. Esse formato não é recomendado para armazenar estruturas multidimensionais complexas, nem para dados vetoriais.
Para transferir a superfície da Terra para um modelo digital virtual é preciso realizar procedimentos que estabelecem práticas para o objeto contido no arquivo criado e que nele se possui informações. Por exemplo, uma escola criada em um arquivo vetorial, ela será apenas um ponto, mas possui informações a ela vinculadas, como suas dimensões, localização espacial, quantidade de alunos etc. No SIGs, os objetos devem relacionar-se geograficamente e podem ou não participar do processamento dos dados. A estrutura da modelagem depende das características dos objetos envolvidos e das necessidades do usuário (FITZ, 2008).
Os modelos são aproximações subjetivas, porque não conseguem apresentar todas as observações ou medidas associadas aos objetos, mas possuem valor por permitirem a análise de aspectos da realidade. Assim, modelo é uma apresentação formal de relações entre entidades definidas nos termos físicos ou matemáticos. Um modelo pode especificar três tipos de variáveis: as variáveis de entrada, que são independentes do modelo e permitem a variação dos valores associados. As variáveis de saída, que já são totalmente dependentes do modelo, e procuram mostrar as saídas como resultados de características de diferentes entradas; E, as variáveis status, que especificam certas condições relevantes, porém são mantidas constantes durante o funcionamento do modelo (ROSA, 2013).
De modo geral, os modelos são classificados em físicos, analógicos e matemáticos. O modelo físico representa, na maioria dos casos, o sistema por um molde em escala menor. Os modelos analógicos aproveitam-se da analogia das equações que conduzem diferentes fenômenos. Já os modelos matemáticos ou digitais são os que representam a natureza do sistema através de equações matemáticas. Esses são os modelos mais utilizados nos SIGs (ROSA, 2013).
O desenvolvimento de um modelo utiliza a simulação de fenômenos complexos através de uma combinação de informações espaciais e não-espaciais. Neste ponto, geralmente, é necessário um especialista na área de conhecimento. Em geral, na simulação há três fases: o ajuste, a verificação e a aplicação. O ajuste é a fase da simulação, em que os parâmetros devem ser identificados. A verificação é a utilização do modelo já calibrado. Nesta etapa é necessário conferir a validade do modelo e do ajuste em diferentes condições. A aplicação é a fase em que o modelo é utilizado para representar situações quando não se conhece a saída do sistema (ROSA, 2013).
O espaço geográfico é modelado de duas formas: modelo de campos e de objetos. O modelo de campos entende o espaço geográfico como uma superfície contínua, sendo que os fenômenos observados são variados. Por exemplo, um mapa de solos mostra a distribuição de cada tipo de solo em cada ponto do mapa. Já o modelo de objetos representa o espaço geográfico como um grupo distinto e identificável. Exemplificando, os lotes de um município identificados como um dado individual, contendo atributos que os distinguem uns dos outros. O mesmo pensamento serve para os rios de uma bacia hidrográfica (CÂMARA; MEDEIROS, 1998).
Podemos definir então que:
Define-se uma região geográfica R como uma superfície qualquer pertencente ao espaço geográfico, que pode ser representada num plano ou reticulado, dependente de uma projeção cartográfica (CÂMARA; MEDEIROS, 1998, p. 25).
A região geográfica é um suporte para a localização dos atributos que serão representados por um ou mais pontos em R. Já os geo-campos podem ser definidos como “a distribuição espacial de uma variável que possui valores em todos os pontos pertencentes a uma região geográfica, num dado tempo t ” (CÂMARA; MEDEIROS, 1998, p. 25).
Podemos ter múltiplas representações do mesmo geo-campo em diferentes épocas. Um exemplo são mapas da cobertura do solo que mostram a diferenças no uso e ocupação ao longo do tempo.
Os geo-campos podem ter especificidade: o temático quando a região geográfica possui um tema como, por exemplo, vegetação, solos e etc. O numérico quando associa um ponto a um valor real, como o mapa altimétrico. Por último, o dado_sensor_remoto sendo esta classe um tipo de numérico, obtida através de quantização da resposta de uma área da superfície terrestre recebida por um sensor remoto (CÂMARA; MEDEIROS, 1998).
Já os geo-objetos podem ser definidos como “um elemento único que possui atributos não-espaciais e está associado a múltiplas localizações geográficas. A localização pretende ser exata e o objeto é distinguível de seu entorno” (CÂMARA; MEDEIROS, 1998, p. 26).
Então, os geo-campos podem ser divididos em 5 tipos: as isolinhas que podem ser curvas de nível, por exemplo; polígonos adjacentes como na divisão de municípios; tesselação, como as imagens de satélite; amostragem como o caso dos pontos cotados nas cartas topográficas e; rede triangular irregular (TIN) que pode ser utilizada na geração de modelos digitais de elevação ou de terreno (MDE, MDT).
Os dados geográficos são importantes no trabalho com os Sistemas de Informações Geográfica. Assinale a alternativa que apresenta quais os dois tipos de dados geoespaciais.
Uma das principais bases para a elaboração de produtos cartográficos são os produtos obtidos por meio do sensoriamento remoto.
Sensoriamento remoto é a arte e a ciência na obtenção de informações sobre um objeto sem, necessariamente, estar em contato físico com ele. Não existe uma distância pré-determinada que diga o que pode ser considerado remoto, por exemplo, um satélite pode observar outros planetas e sistemas estelares, um microscópio eletrônico pode ser utilizado para obter fotografias de objetos extremamente pequenos, um instrumento de raio-X pode ser utilizado para “enxergar” ossos ou outra matéria interna sem tocar na pele ou nos músculos (JENSEN, 2009).
Para sensoriamento remoto a energia solar é a base de todos os princípios que se enquadram nesta tecnologia, mesmo sensores ativos funcionam a base de energia solar (MOREIRA, 2005). Os sensores são divididos em dois tipos: ativos e passivos. Os sensores ativos são aqueles que possuem uma fonte de energia própria, eles podem emitir uma quantidade de energia na direção dos objetos alvo para captar a sua reflexão. Um exemplo de sensor ativo é o Radar (FITZ, 2008).
Já os sensores passivos não possuem fonte própria de energia e necessitam de fontes externas para captar a reflexão dos alvos. Uma filmadora ou uma câmera fotográfica sem spot ou flash enquadram-se nesta categoria (FITZ, 2008). Nessa categoria temos os principais sensores dos principais satélites em órbita utilizados no Sensoriamento remoto, como a série Landsat, CBERS, entre outros.
A origem do Sensoriamento Remoto começa nas primeiras imagens aéreas capturadas. No início o uso era militar, em meados de 1860 durante a Guerra civil americana. Existia uma divisão de balonistas para obter essas fotografias, porém foi durante a Primeira Guerra Mundial que as fotografias áreas passaram a ser obtidas com o uso de aviões. Durante a Segunda Guerra Mundial houve o desenvolvimento de novas tecnologias como o filme infravermelho para melhorar as imagens capturadas e diferenciar alvos camuflados na vegetação. Além disso, ocorreu também o advento do Radar e avanço nos sistemas de comunicações (FLORENZANO, 2002).
Durante a chamada Operação Bodyguard , que serviu de cortina de fumaça para a Operação Overlord , conhecida como a invasão da Normandia, os aliados criaram uma série de planos de invasão falsos e transmitiam aos alemães para causar certa confusão do local exato do desembarque das tropas aliadas. Como parte dos vários planos os aliados utilizaram um dos seus mais conhecidos generais George S. Patton, muito respeitado pelo exército Alemão. Patton ficou responsável pela divisão fictícia baseada na cidade de Dover, Inglaterra. Nesta divisão havia milhares de tanques, aviões e outros equipamentos de guerra de mentira, eram todos balões infláveis e os sons foram todos produzidos por sistemas de alto-falante.
Devido as fotografias áreas não terem muita resolução, na época, essa tática causava certa confusão em quem analisasse as imagens e o uso do General Patton, fez com que os alemães acreditassem que ele fosse liderar a invasão a Europa pela região de Pas-de-Calais (França), o que não aconteceu. A inteligência alemã não foi totalmente convencida e o plano do exército fantasma dos aliados não foi tão útil, mas ajudou a atrasar o envio de tropas alemãs para a região que efetivamente foi invadida, na Normandia. Esse exército foi utilizado em outros eventos durante a Guerra.
Entretanto, foi durante a Guerra Fria que o Sensoriamento Remoto avançou, principalmente no desenvolvimento de equipamentos de espionagem. Durante a corrida espacial, as primeiras imagens orbitais foram capturadas e, com isso, viu-se o potencial e as vantagens deste tipo de fotografia. Assim, em abril de 1960 o satélite meteorológico da série TIROS foi lançado. Em julho de 1972 foi lançado o primeiro satélite de recursos terrestres, o ERTS-1, rebatizado para LANDSAT-1 (FLORENZANO, 2002).
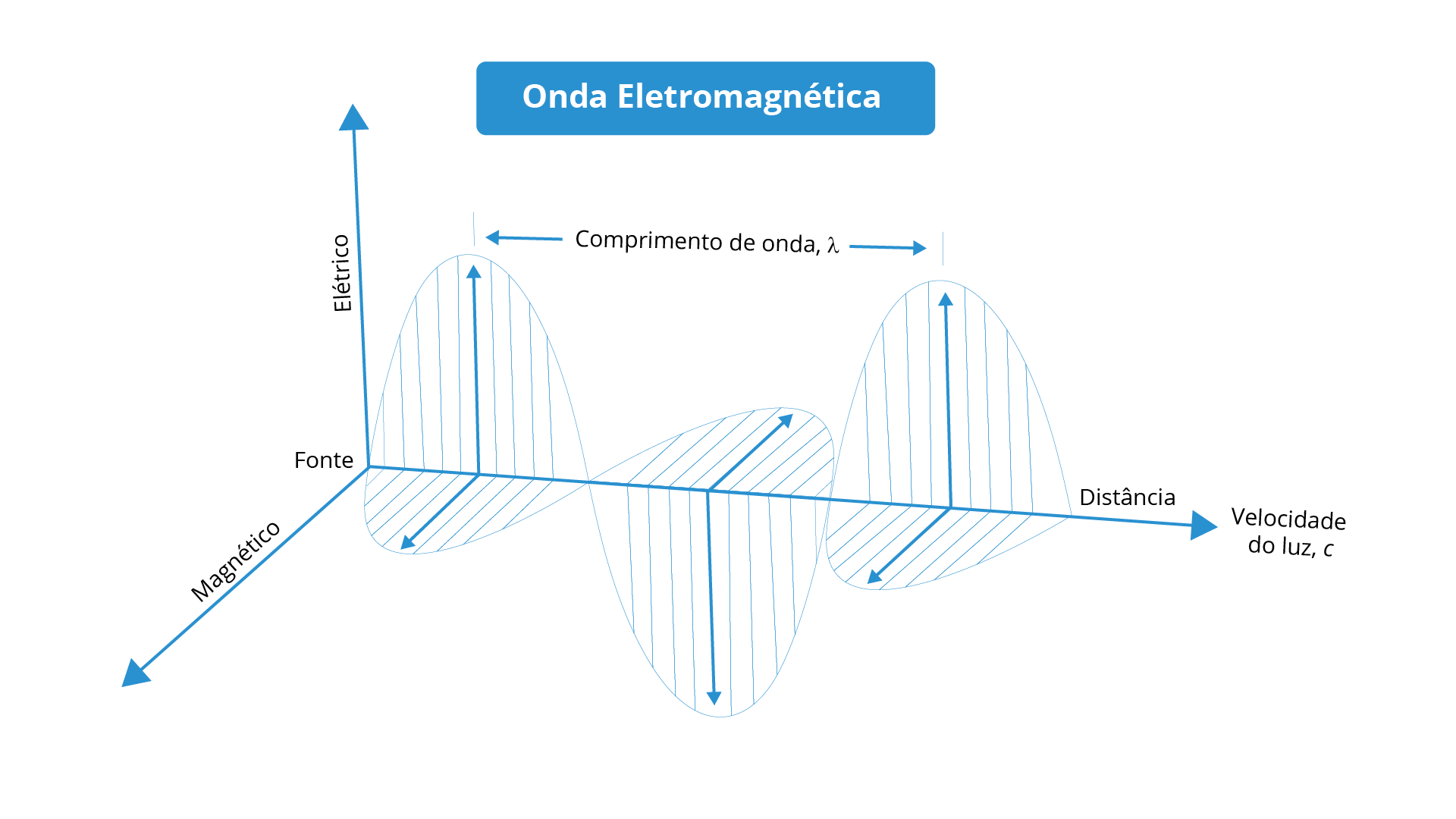
A radiação eletromagnética é originária dos átomos e estão presentes em toda a matéria existente, algumas partículas dos átomos possuem uma carga elétrica e produzem uma energia, essa energia é descrita como um movimento em ondas. As ondas, por sua vez, possuem dois tipos: a eletricidade e o magnetismo. Assim como outras ondas, as ondas eletromagnéticas possuem picos e vales, a distância entre o pico de uma onda e o pico da onda seguinte é chamado comprimento de onda. Nas ondas eletromagnéticas os comprimentos de onda variam de acordo com o tipo de onda. Dentro do espectro eletromagnético existem vários tipos de ondas que possuem diferentes comprimentos de ondas.
As ondas eletromagnéticas são do tipo transversal e, por isso, não necessitam de um meio de propagação, assim, propagam-se até mesmo no vácuo (MOREIRA, 2005). A radiação eletromagnética é gerada toda vez que uma carga elétrica é acelerada. O comprimento de onda REM tem relação com a duração do tempo que a partícula carregada é acelerada. O comprimento de onda é a distância média entre dois picos e é normalmente medido em micrômetros (µm) ou nanômetros (nm). Já a frequência é o número de comprimentos de onda num determinado ponto medido no tempo. A onda que emite um pico a cada segundo e completando um ciclo, é aquela que possui uma frequência de um ciclo por segundo, ou um hertz , abreviado como 1 Hz (JENSEN, 2009).
A radiação eletromagnética gera dois tipos de campos: o elétrico e o magnético, eles são perpendiculares entre si e oscilam no mesmo sentido de propagação da onda. É possível ser demonstrado, fisicamente, que um campo elétrico gera um campo magnético e um campo magnético gera um campo elétrico (FITZ, 2008). A Figura 2.1 mostra um esquema da Onda Eletromagnética.
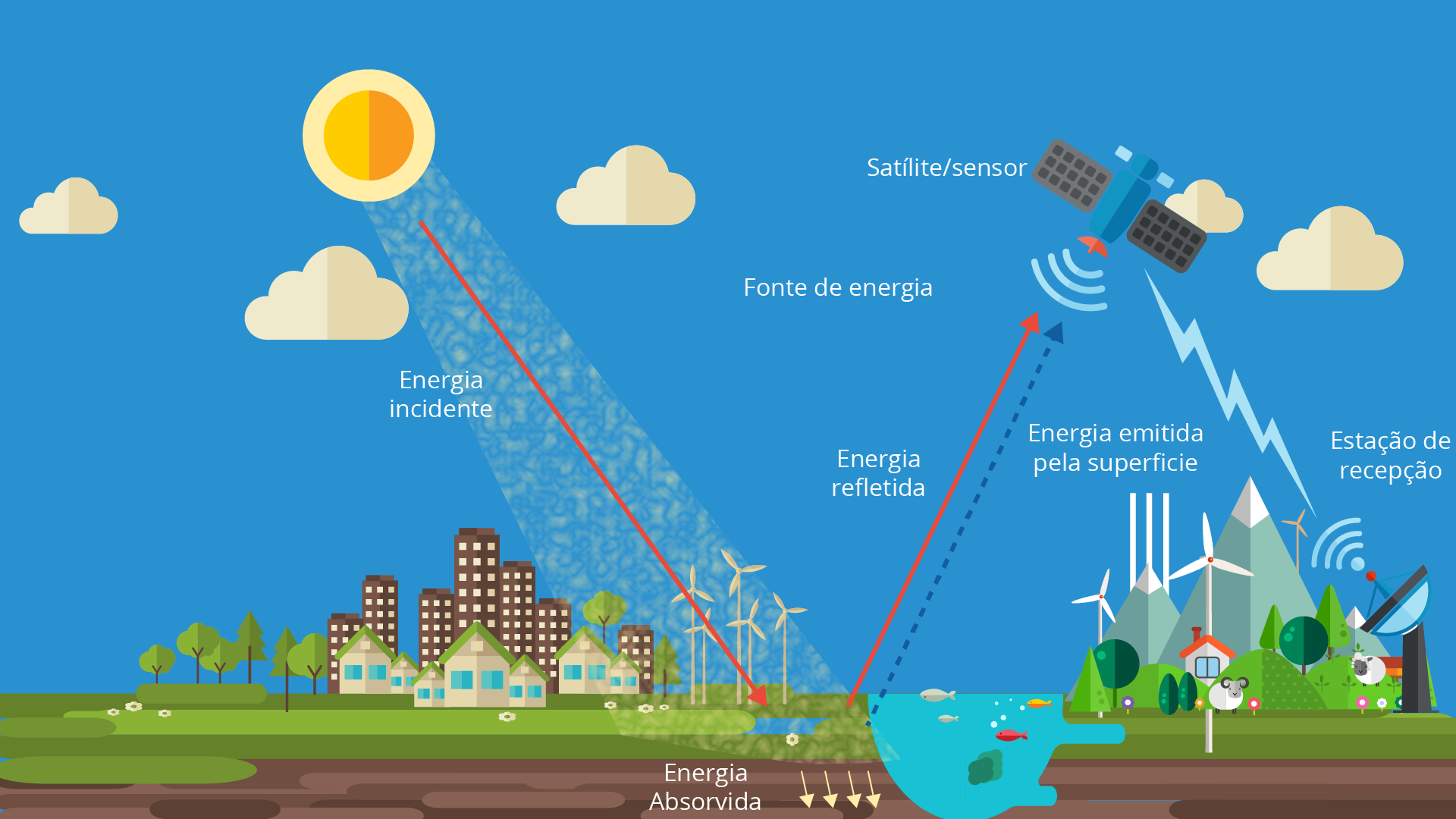
O Sol é a mais importante fonte natural de radiação eletromagnética. Ao chegar na superfície terrestre, a energia solar causa diversos fenômenos físicos, entre eles se destacam os relacionados à absorção, ao aquecimento, à reflexão e à transmissão de energia. Quando a energia é refletida, ela pode ser captada por sensores acoplados em satélites artificiais que orbitam a Terra (FITZ, 2008). A Figura 2.2 apresenta um esquema básico de como são obtidas as imagens de sensoriamento remoto.
O espectro eletromagnético é uma representação contínua da radiação eletromagnética no que se refere aos comprimentos de onda, frequência ou energia. Ele está subdividido em faixas, que representam regiões possuindo características específicas sobre os processos ou mecanismos físicos geradores ou detectores de energia (ROSA, 2013). Todos os objetos acima do zero absoluto (-273 ºC ou 0 K) emitem energia eletromagnética. Todos incluindo a água, solo, rocha, vegetação, seres vivos (JENSEN, 2009).
Fitz (2008) lista algumas das principais faixas do espectro eletromagnético, conforme Quadro 2.1.
Nesse sentido, o Infravermelho subdivide-se em:
Infravermelho próximo (entre 0,7 μm e 5 μm);
Infravermelho médio (entre 5 μm e 30 μm);
Infravermelho distante (entre 30 μm e 1,0 mm).
A porção situada entre cerca de 8 μm a 14 μm é chamada de infravermelho termal, pois nela se estabelecem as emissões máximas de calor de um corpo (FITZ, 2008).
A faixa do visível subdivide-se em:
0,380 μm a 0,440 μm
0,440 μm a 0,485 μm
0,485 μm a 0,500 μm
0,500 μm a 0,565 μm
0,565 μm a 0,590 μm
0,590 μm a 0,625 μm
0,625 μm a 0,740 μm
Na Figura 2.3 podemos observar o Espectro eletromagnético.
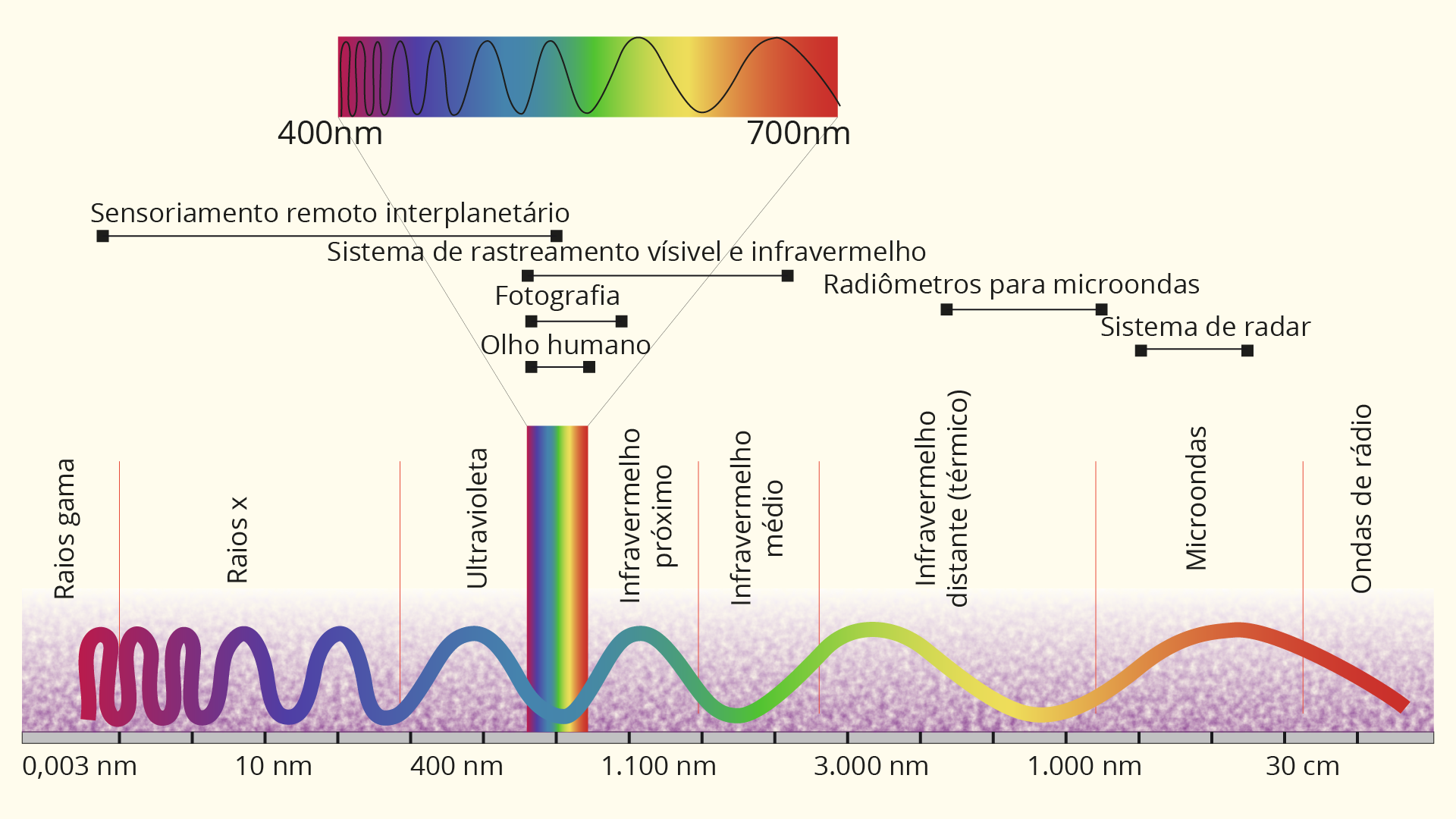
A principal faixa do espectro eletromagnético utilizado pelo sensoriamento remoto está situada entre o ultravioleta e o infravermelho termal. É nessa região do espectro que mais sofre os efeitos da atmosfera terrestre, devido a isto, dependendo do comprimento de onda emitido, haverá uma maior ou menor resistência. As micro-ondas utilizadas pelo radar não sofrem influência significativa das nuvens. (FITZ, 2008).
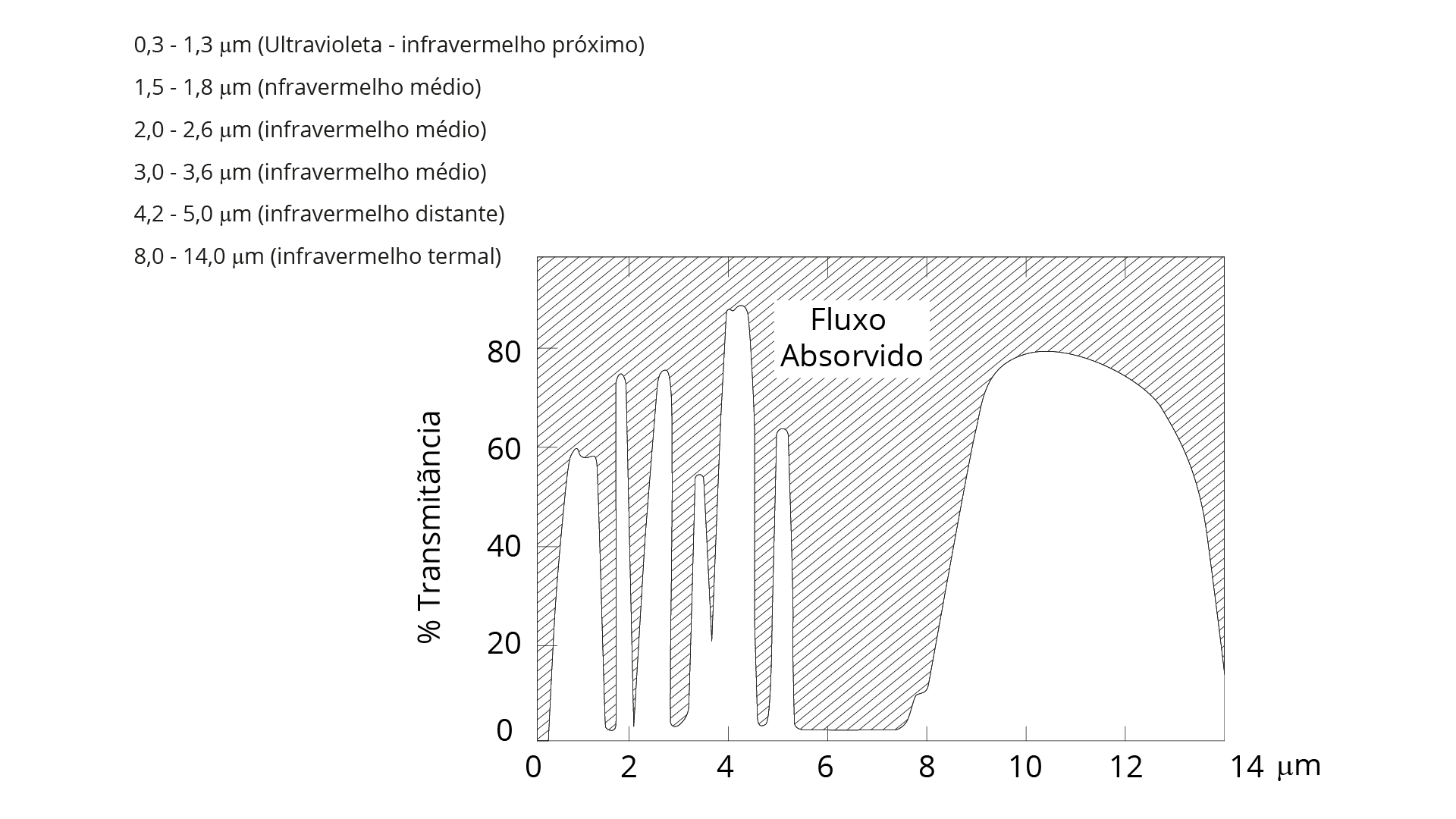
Com a propagação da radiação eletromagnética pela atmosfera, ela vai sendo seletivamente absorvida por vários constituintes, como: vapor d’água, ozônio, dióxido de carbono etc. Nas faixas do ultravioleta e visível, o ozônio é o principal atenuador por absorção, enquanto que na faixa do infravermelho o vapor d’água e o dióxido de carbono são os principais atenuadores. Existem algumas regiões no espectro eletromagnético em que a absorção atmosférica é relativamente pequena. Essas regiões são conhecidas como janelas atmosféricas e se caracterizam por possuírem uma boa transparência. Nessas regiões desenvolvemos praticamente todas as atividades de sensoriamento remoto (ROSA, 2013). A Figura 2.4 apresenta essas janelas.
No espalhamento a radiação solar incidente na atmosfera interage com ela, gerando um campo de luz difusa que se propaga em todas as direções. Devido a isto, é necessário que, tanto no processo de planejamento da aquisição de dados, quanto no processo de interpretação de produtos advindos de sensores remotos é importante considerar o fenômeno de espalhamento, porque a radiação eletromagnética coletada no sensor não provém somente do alvo, uma vez que a radiação espalhada pela atmosfera e por outros alvos poderá também atingir o sistema sensor, mascarando, total ou parcialmente a informação desejada (ROSA, 2013).
Para exemplificar, a energia solar é absorvida pelos gases e vapores d'água existentes nas nuvens, que por sua vez, se dispersam ou espalham na atmosfera. Quanto maior o volume da nuvem, os efeitos serão mais percebidos. A coloração da nuvem muda de branca (pouca taxa de absorção e espalhamento) para cinza-escuro (alta taxa de absorção e espalhamento), a coloração azul do céu (presença de vapor d'água) e as variações de tons no início e no final do dia (presença de partículas) são exemplos do espalhamento da energia solar (FITZ, 2008).
No sensoriamento remoto é necessário o uso de sensores para capturar as informações dos alvos. Assinale a alternativa que apresenta quais são os tipos de sensores utilizados no Sensoriamento remoto.
Toda a superfície terrestre possui um comportamento espectral diferente e isso modifica a sua intensidade de reflectância, alterando a maneira como os sensores capturam a imagem desses alvos e, principalmente, a maneira como analisamos as imagens de Sensoriamento Remoto. A Figura 2.5 mostra três alvos água, solo e vegetação.
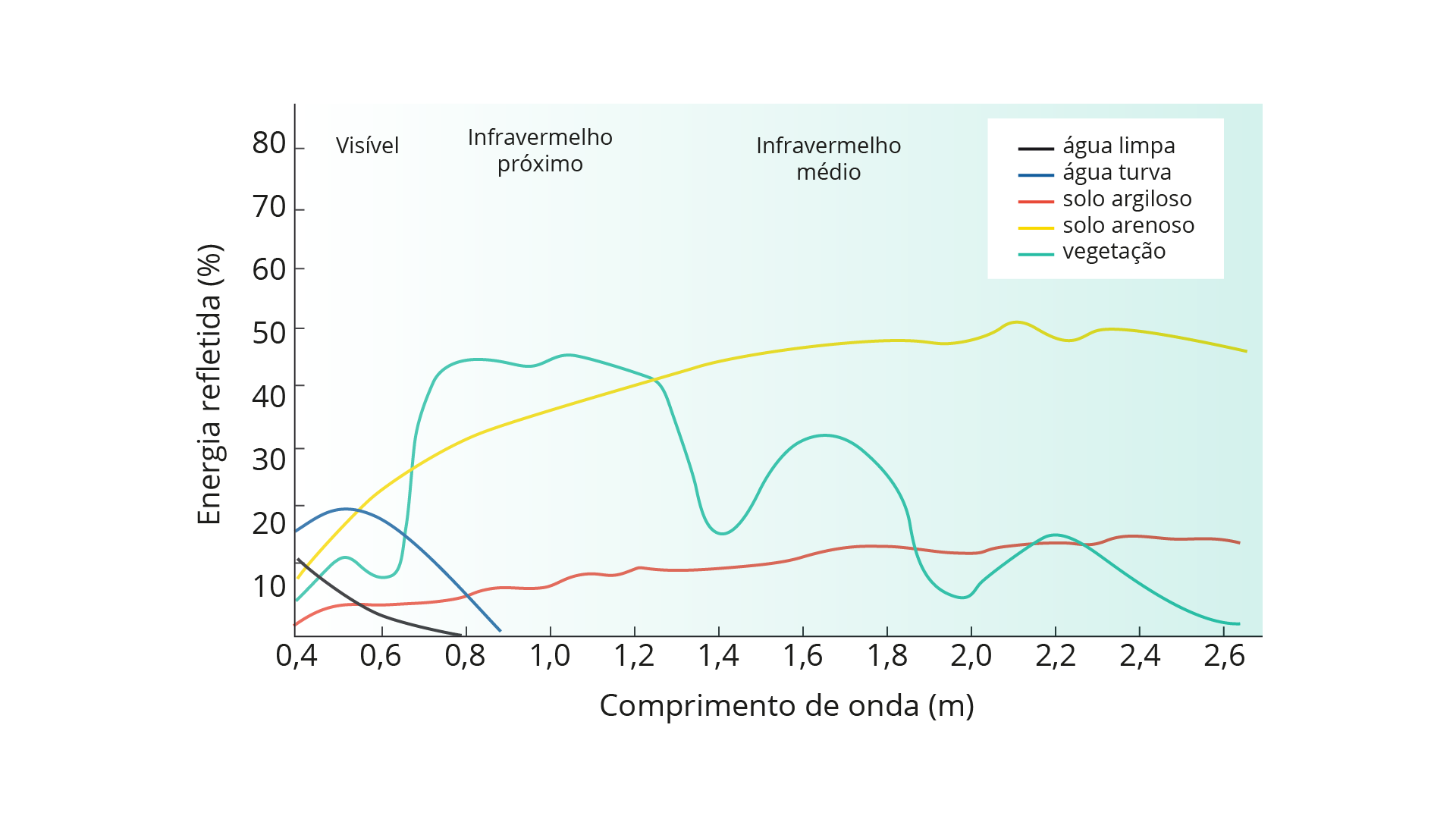
O comportamento espectral para Minerais e Rochas leva em consideração os elementos e substâncias presente neles. A faixa do espectro refletido (0,4 a 2,5 µm) são íons ferroso e férrico, água e hidroxila. Os elementos químicos mais frequentes como o silício, alumínio e magnésio possuem interesse secundário (ROSA, 2013).
Em solos esse comportamento está ligado a porcentagem de matéria orgânica, a granulometria, a composição mineralógica, a umidade e a capacidade de troca catiônica (CTC) do solo. O aumento da matéria orgânica provoca uma diminuição da resposta espectral. Para granulometria, o aumento da concentração de minerais félsicos (minerais claros), causa um aumento nos valores de reflectância e atenuação das bandas de absorção. Quando aumenta a concentração dos minerais máficos (minerais escuros), ocorre o efeito ao contrário. Os solos úmidos possuem menor reflectância que os solos secos na faixa do espectro (ROSA, 2013).
Para a vegetação, considerando que o comportamento espectral típico de uma folha verde está no intervalo de 0,4 a 2,5 μm, na região do visível a reflectância é baixa, devido à forte absorção da radiação dos pigmentos do grupo da clorofila. Existem duas bandas de absorção, aproximadamente, em 0,48 μm, devido à presença de carotenos, e 0,68 μm, por causa do processo de fotossíntese. O pico em torno de 0,5 μm correspondente à região verde do espectro visível, por isso a coloração da vegetação é verde. A outra faixa importante é entre 0,7 a 1,3 μm (infravermelho próximo). Esse pico tem relação com a estrutura interna celular da folha, ele é importante para a folha manter um equilíbrio no balanço de energia e não se superaqueça, evitando a destruição da clorofila (ROSA, 2013). Os dados de vegetação são para uma única folha verde sadia. No entanto, devido aos diferentes tipos de plantas, esses valores são alterados para mais ou para menos.
Para a água limpa a reflectância diminui com o aumento dos comprimentos de onda, ou seja, os picos estão na região do visível, especificamente, nos comprimentos de onda do azul e verde, decrescendo em direção ao infravermelho. Com o aumento de sedimentos na água, o pico de reflectância aumenta na direção dos maiores comprimentos de onda causando uma reflectância maior que o da água limpa (ROSA, 2013).
Diferentes alvos emitem diferentes comprimentos de onda. Na vegetação podemos entender que diferentes plantas emitem diferentes comprimentos de onda. O tipo de vegetação é o único fator para essa diferença? Para respondermos essa pergunta, precisamos pensar nos outros elementos. Além, da variação dos tipos de folhas, o tipo de solo e a quantidade de água alteram a maneira do desenvolvimento de uma planta e, consequentemente, altera a sua coloração. Outro fator importante é a localização geográfica e a época do ano. Se as regiões são mais secas ou úmidas, se é inverno ou verão, esses também são fatores que alteram a reflectância da vegetação. Essa análise é muito útil quando precisamos realizar mapeamentos sobre o desmatamento, sobre o avanço das atividades agropecuárias ou mesmo sobre o avanço das áreas urbanas.
A obtenção de imagens de Sensoriamento Remoto é realizada por meio de satélites artificiais que estão na órbita da Terra. Existem vários tipos de satélites, como os militares, científicos, de comunicação, meteorológicos, de recursos naturais e de observação da Terra. Os satélites podem ser classificados pela sua forma de orbitar a Terra sendo mais de duas formas orbitais: polar (heliossíncrona) e geoestacionário, veja na Figura 2.6 esses dois tipos.
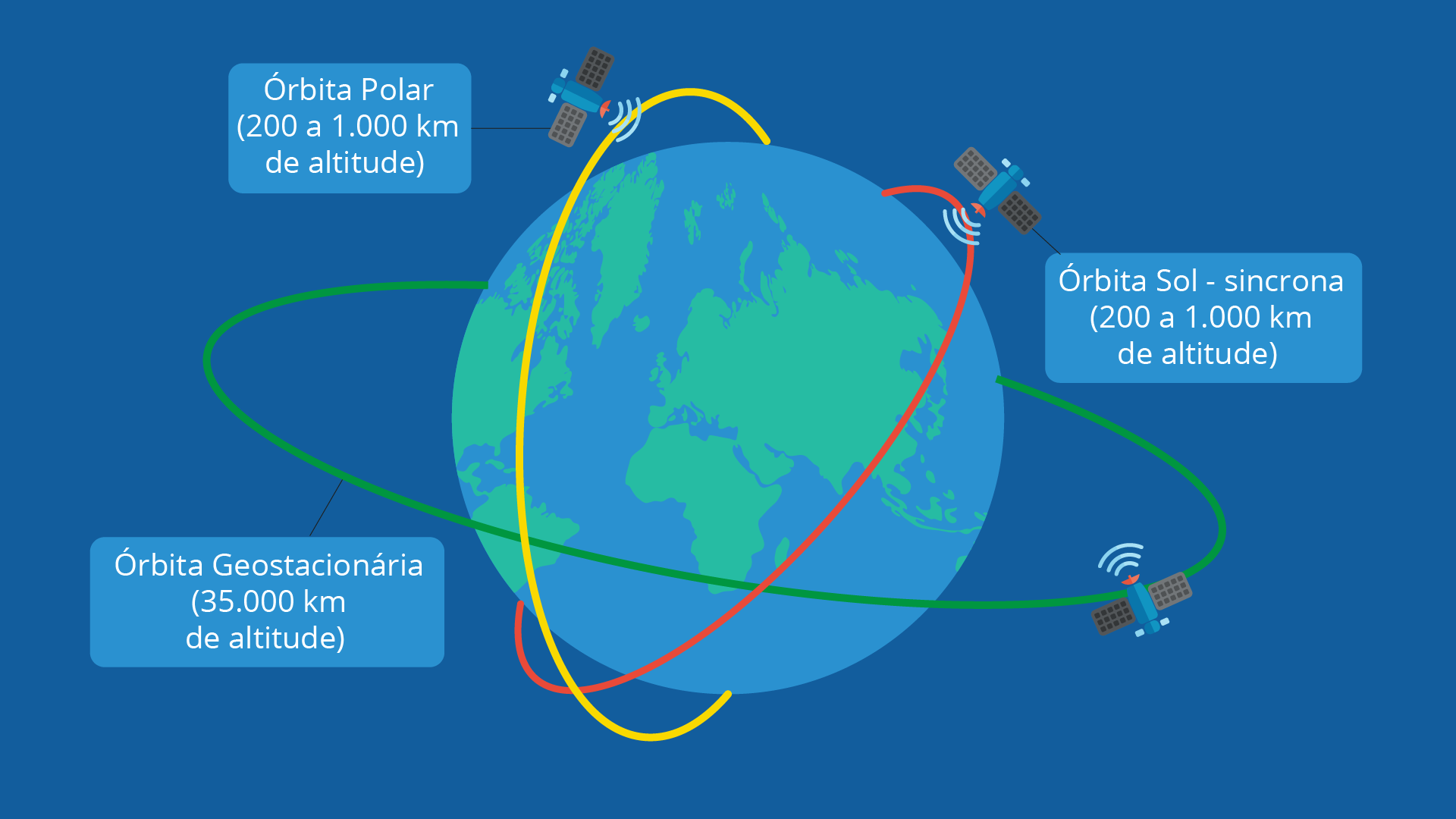
Os satélites orbitais utilizados em sensoriamento remoto podem possuir órbitas polares, quando passam próximas dos polos com inclinação aproximada de 90° em relação ao plano do Equador (FITZ, 2008). Os satélites em órbita heliossíncrona possuem inclinação menor de 90°, mas não são equatoriais, como exemplificado na Figura 2.6.
Os satélites geoestacionários permanecem numa posição que lhes permita um deslocamento velocidade igual e no mesmo sentido do movimento de rotação terrestre. Em termos de sensoriamento remoto, os satélites geoestacionários são utilizados para obter imagens que auxiliam nas previsões meteorológicas (FITZ, 2008). Portanto, os satélites com órbita geoestacionária ficam “girando” no junto da Terra o que dá a impressão de estarem parados (estacionados).
As imagens de Sensoriamento Remoto utilizam sensores para a captura de imagens. Um sensor é um dispositivo que identifica à radiação eletromagnética em uma faixa pré-determinada do espectro eletromagnético, ele faz um registro e gera um produto adequado para ser interpretado pelo usuário. O sistema do sensor, geralmente, é constituído por um coletor (lente, espelho ou antena) e um sistema de registro (detector ou filme) (ROSA, 2013).
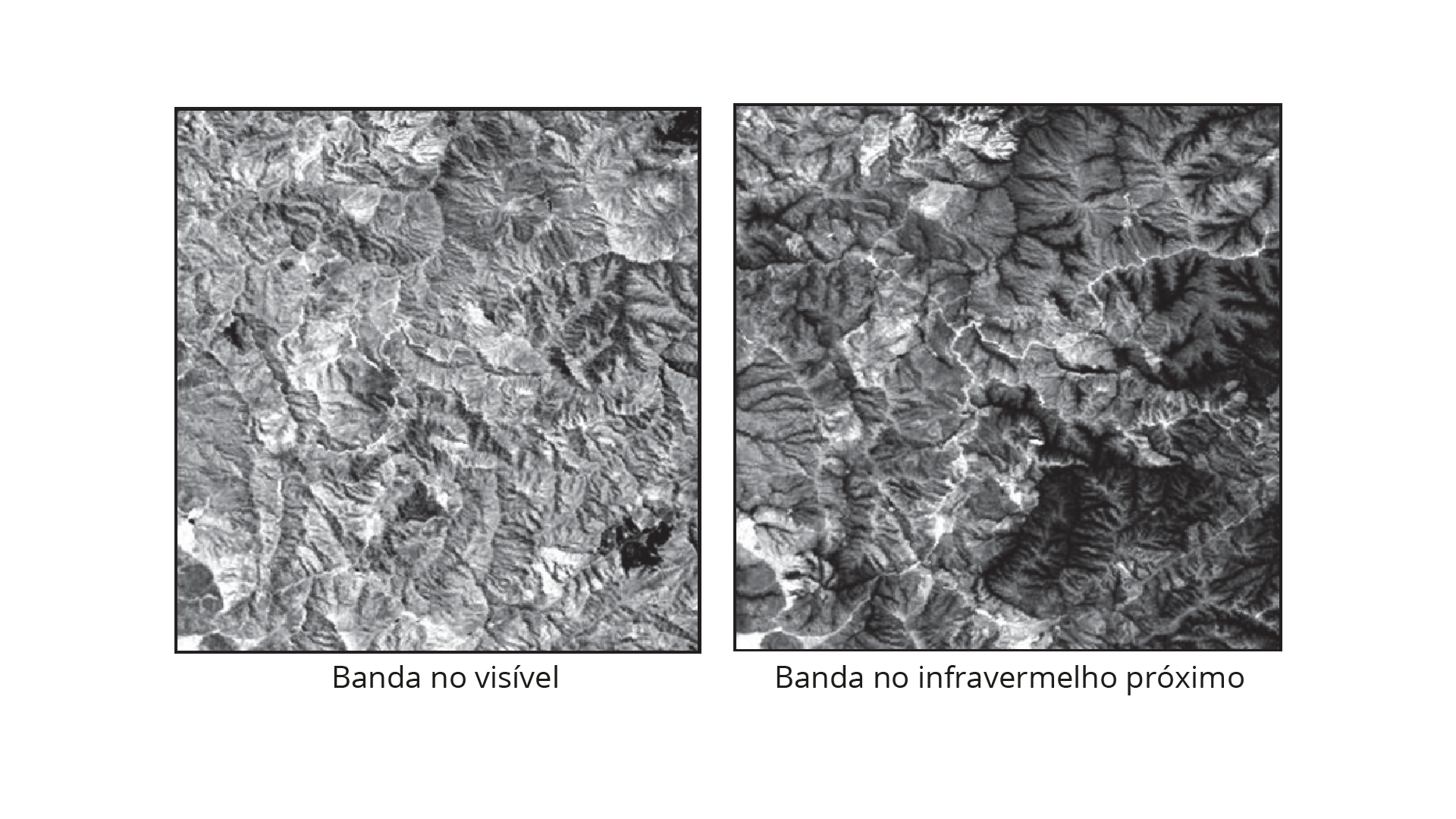
Os sensores possuem resoluções diferentes e de características específicas definidas pelas próprias imagens coletadas. Resolução temporal é o tempo que o sensor leva para retornar a uma área previamente imageada. Já a Resolução espacial é a área real da superfície terrestre por cada pixel correspondente na imagem (observe na Figura 2.7). E, a Resolução espectral é dada pela banda espectral compatível com o equipamento, ou seja, a capacidade de absorção (número de canais) do sensor em relação aos comprimentos de onda, conforme a Figura 2.8 (FITZ, 2008).
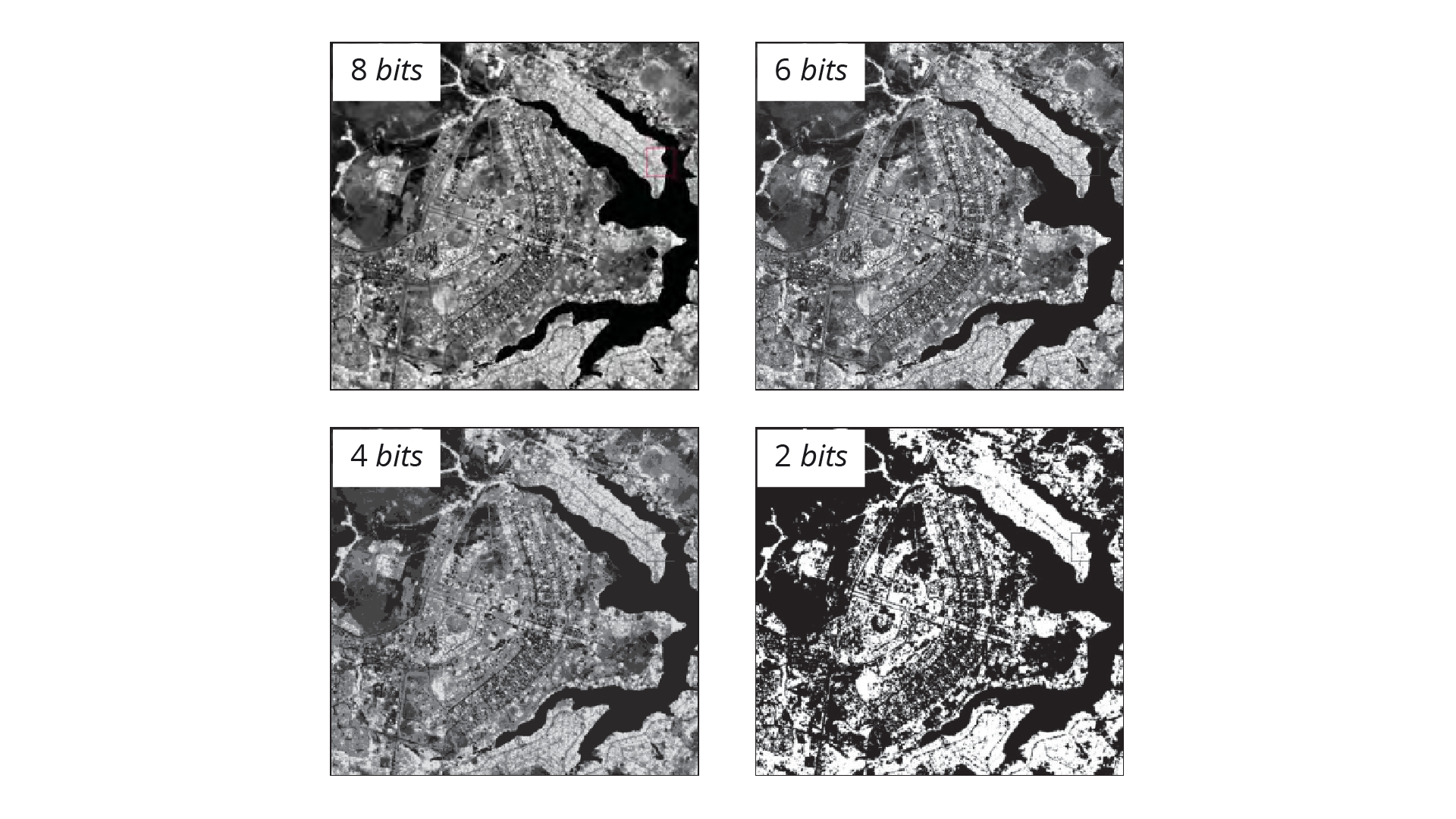
A Resolução radiométrica está relacionada com a quantidade de níveis digitais existentes na imagem. Quanto maiores os níveis digitais, maior será a resolução radiométrica e a qualidade da imagem será melhor. Essa resolução é representada pelos níveis de cinza (ou cores) de uma imagem e, geralmente, está na forma binária, ou bits, necessários para o seu armazenamento (Figura 2.9). Resolução digital dada pela quantidade de pixels (ppi) ou pontos por polegada (dpi) (FITZ, 2008).
Nesse sentido, quanto maior o dpi maior é a resolução da imagem, ou seja, ela será mais nítida, mas não necessariamente terá mais detalhes dos alvos na imagem, pois isso tem relação com a resolução espacial. Duas imagens do mesmo alvo podem ter 300 dpi, que é o mínimo recomendado, porém uma pode estar com resolução de 20 metros (cada pixel representa 20 metros no terreno), e outra com resolução de 1 metro. Nesse caso, a última mostrará detalhes que não poderão ser vistos na outra imagem.
Cada satélite carrega consigo vários tipos de sensores, e cada um obtém um tipo de imagem diferente. O mais comum é o sensor Pancromático, responsável por imagens preto e branco e que, geralmente, possui uma resolução espacial maior em relação aos outros sensores. O sensor pancromático é muito utilizado em estudos que requerem maior resolução da imagem como, por exemplo, estudos relacionados à expansão urbana. Os sensores multiespectrais possuem várias bandas do espectro eletromagnético e conseguem obter imagens na faixa do visível até o infravermelho termal. O uso dessas imagens é variável para cada finalidade.
Para entendermos a formação dessas imagens é preciso entender o espaço de cores RGB. As cores RGB são uma combinação entre o vermelho, verde e azul, formando as cores secundárias ciano, magenta e amarelo. A junção de todas essas cores forma a cor branca. Outro sistema muito utilizado é o CMYK, em que o ciano, magenta e amarelo formam as cores secundárias vermelho, verde e azul. A união de todas as cores forma a cor preta. Uma maneira simples de entender isso é o monitor de computador que, geralmente, trabalha em RGB, essas cores formam o branco. Já o CMYK é mais utilizado em impressoras, essas cores formam o preto. Impressoras coloridas trabalham com tinta (toner) nas cores ciano, magenta e amarelo, além do preto.
As imagens de sensoriamento remoto são, em geral, no sistema RGB. Os sensores multiespectrais capturam as imagens no seu comprimento de onda suportado pelo sensor. Desse modo, uma imagem de satélite pode possuir seis, sete ou mais bandas espectrais, cada uma em um comprimento de onda. Portanto, o usuário deve selecionar três bandas que possuam o máximo da informação desejada, a fim de gerar uma imagem colorida. As melhores bandas são aquelas situadas nas regiões de maior diferença de reflectância entre os alvos (MENESES, 2012a).
Para exemplificar, vamos analisar o satélite Landsat 7 (indisponível desde 2003). Ele possui um sensor multiespectral ETM+ com 8 bandas, com suas respectivas resoluções espaciais sendo:
B1: 0,45 - 0,52 μm (azul - 30 m);
B2: 0,52 - 0,60 μm (verde - 30 m);
B3: 0,63 - 0,69 μm (vermelho - 30 m);
B4: 0,76 - 0,90 μm (infravermelho próximo - 30 m);
B5: 1,55 - 1,75 μm (infravermelho médio - 30 m);
B6: 10,4 - 12,5 μm (infravermelho termal - 120 m);
B7 2,08 - 2,35 μm (infravermelho médio – 30 m);
B8 0,52 – 0,90 μm (Pancromático – 15 m).
Para montar uma imagem colorida é necessário o uso de 3 bandas para o sistema RGB, ou seja, uma para o azul, uma para o verde e outra para o vermelho. Não é necessário o uso das bandas azul, verde e vermelho nesta ordem. Podemos usar vermelho, infravermelho próximo e infravermelho médio como RGB que obteremos uma composição colorida real, ou seja, onde a vegetação é verde.
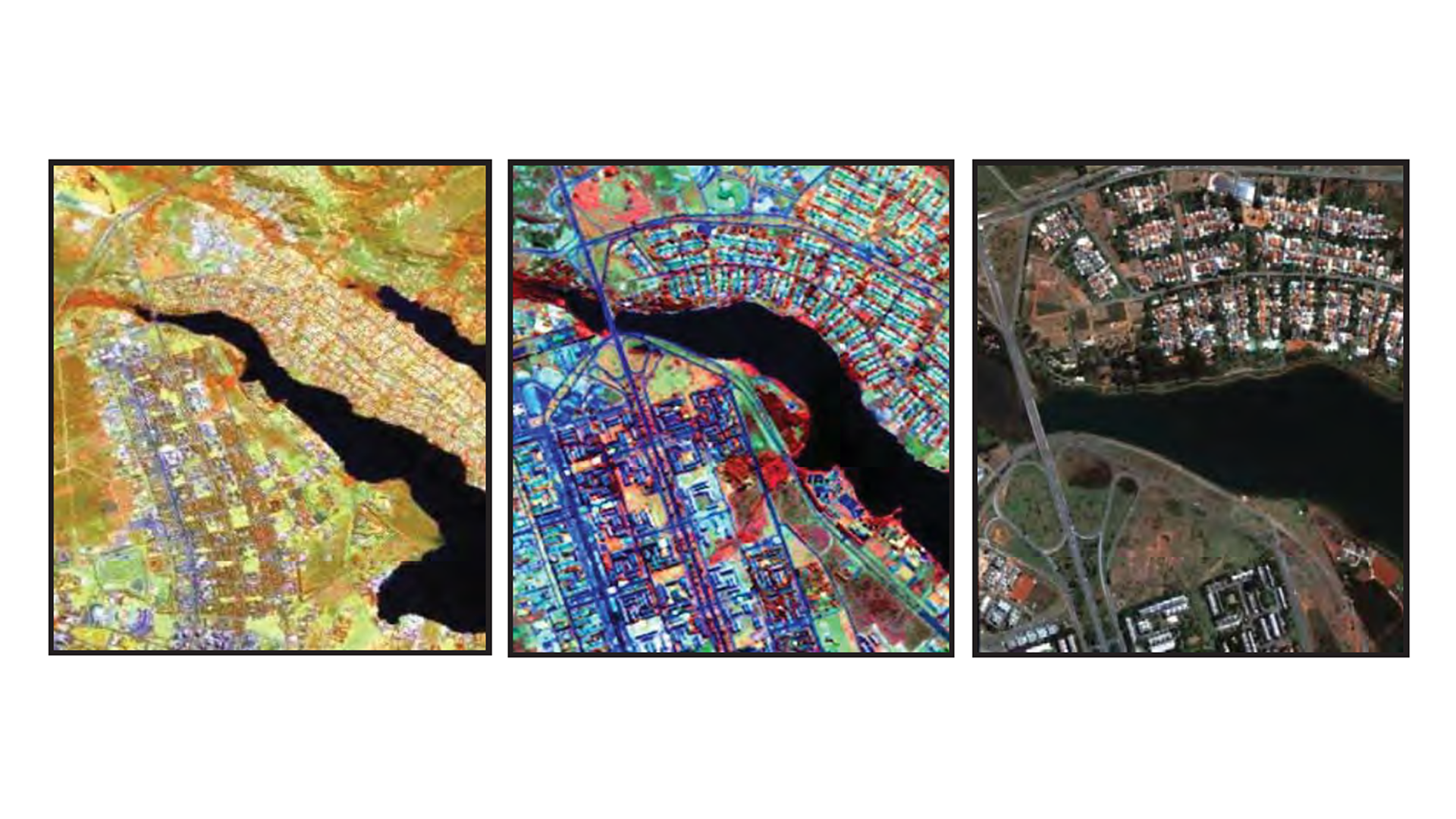
As imagens coloridas dependem da quantidade de energia refletida pelo alvo, da mistura das cores e da associação das cores com as imagens. Se um objeto é totalmente branco ou preto e em todas as imagens em preto e branco, ele continua com sua cor na colorida. Já os tons de cinza se tornam coloridos. Se em alguma imagem preto e branco ele se torna cinza, na foto colorida ele passará a ter alguma cor, isso ocorre em áreas urbanizadas, elas podem ser brancas em determinados comprimentos de onda e cinza em outros. A composição colorida pode ganhar tons magenta ou ciano, isso depende de como é composta a imagem colorida (FLORENZANO, 2002).
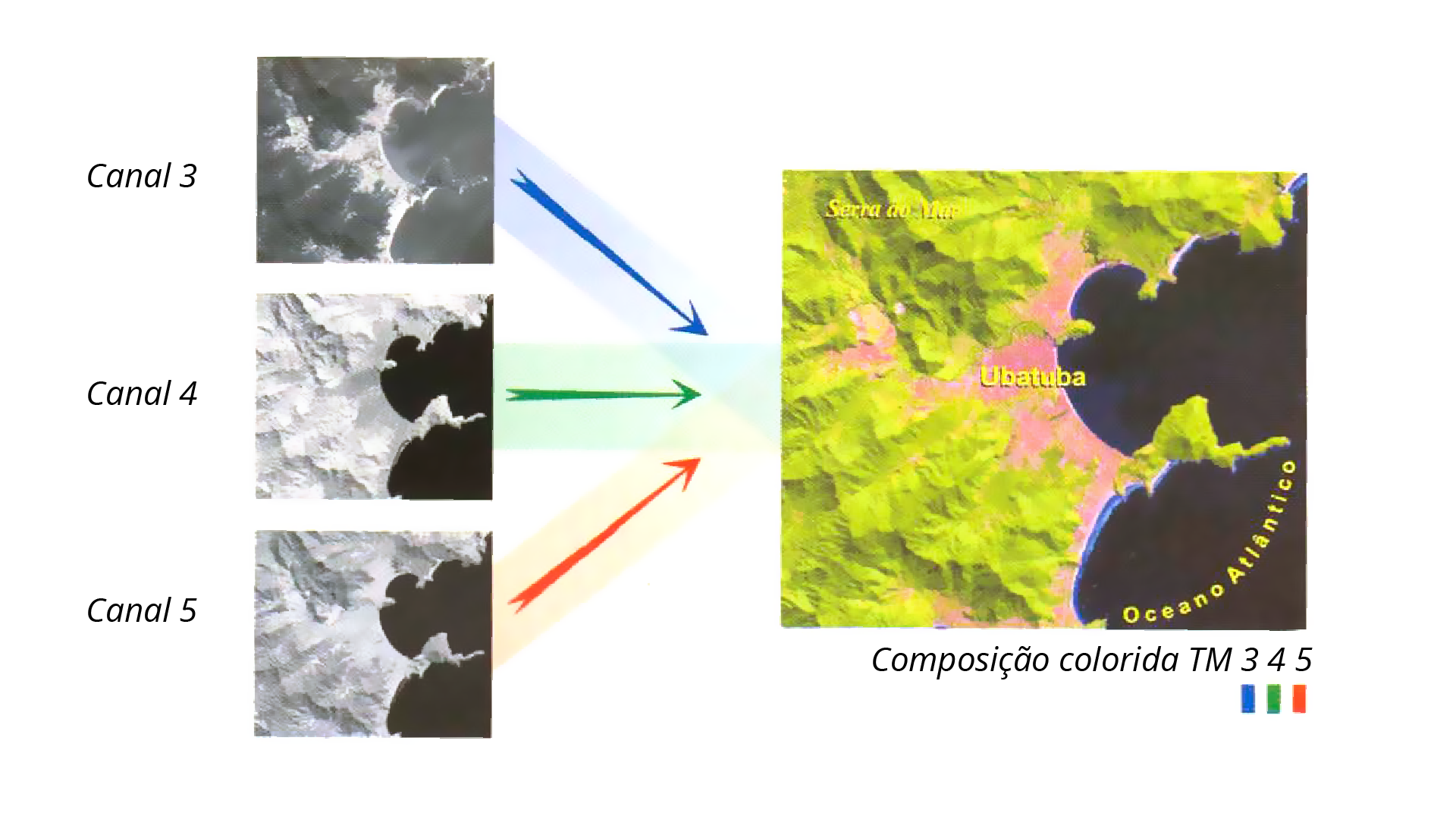
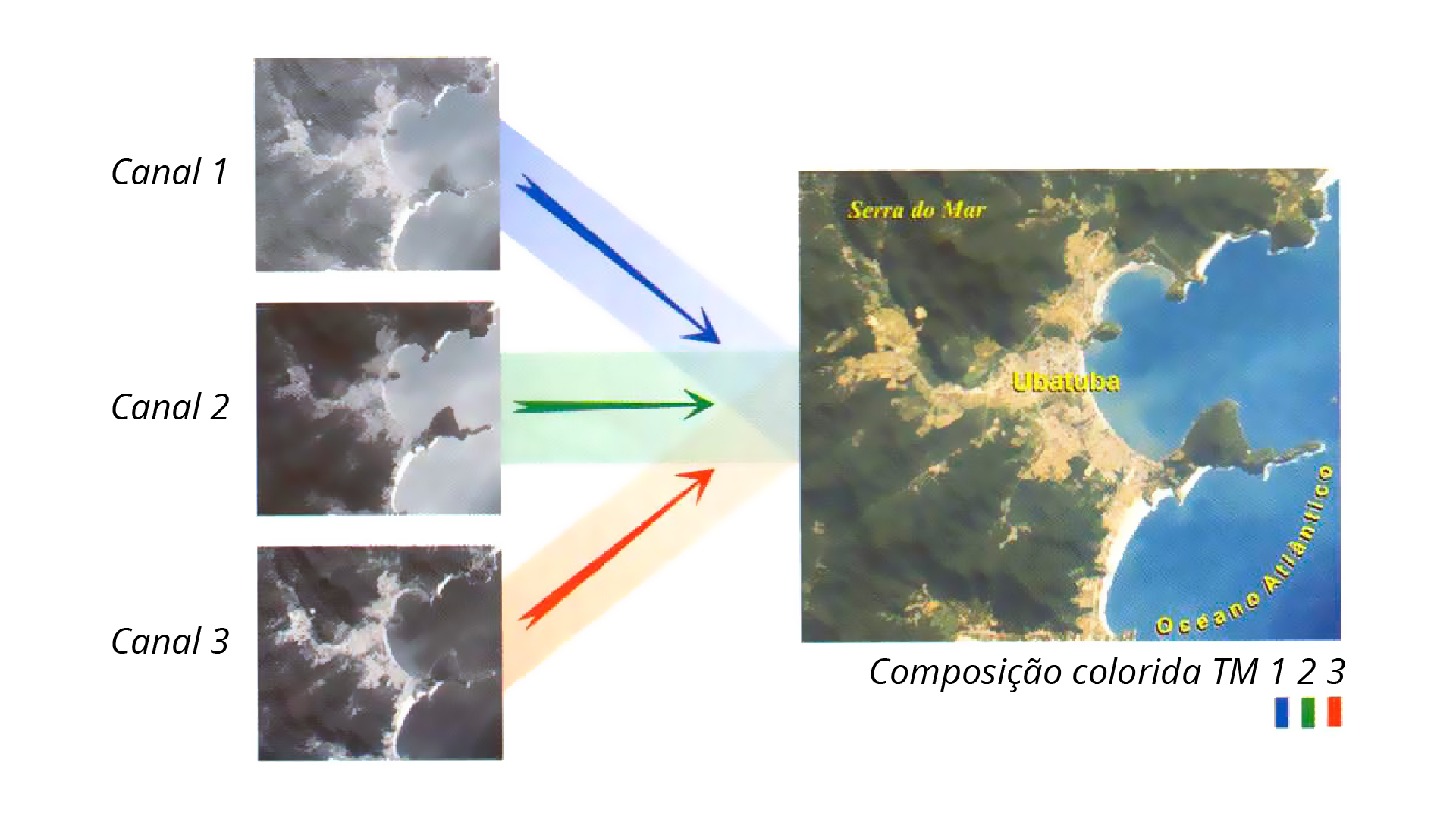
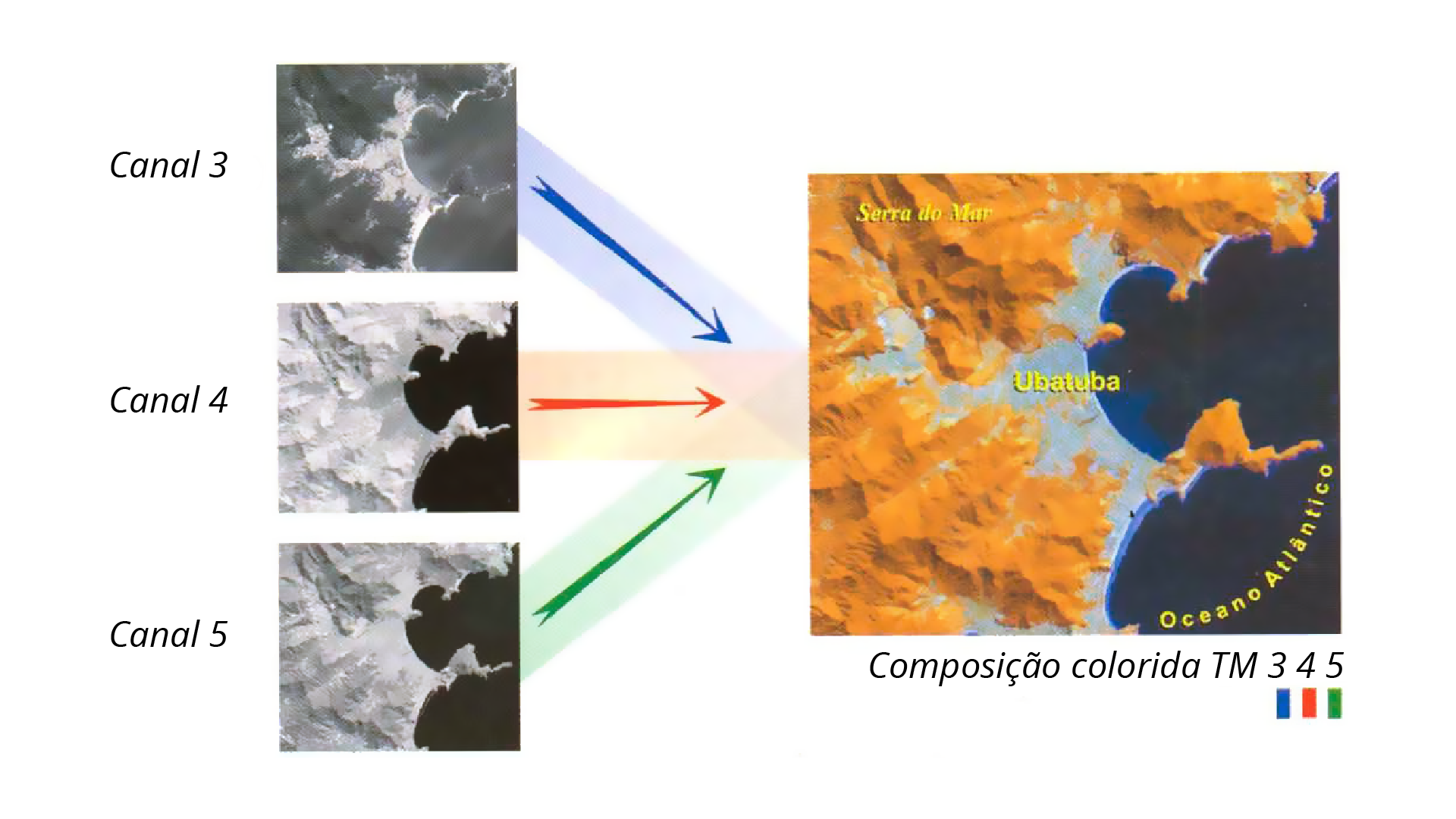
As Figuras 2.10, 2.11 e 2.12 trazem esse tipo de composição para o satélite LANDSAT-7. Na Figura 2.10 foi mantido o RGB, porém as bandas escolhidas foram do vermelho, infravermelho próximo e infravermelho médio. Essa composição mantém a vegetação numa cor esverdeada e as áreas urbanizadas o tom magenta. Na Figura 2.11 foi mantida a composição RGB, porém utilizada as bandas respectivas para cada cor. O resultado é uma imagem mais próxima do real. A Figura 2.12 foi montada com as bandas 3, 4 e 5, como na Figura 2.10, porém ocorreu uma troca, a banda do infravermelho próximo (4) recebeu a cor vermelha. Isso fez com que a vegetação ganhasse cores avermelhadas, devido ao pico da curva espectral da vegetação ser no infravermelho próximo. Essa técnica é útil para destacar os objetos de interesse em uma imagem.
A composição de imagens coloridas pode auxiliar o usuário na interpretação dos objetos da cena. Isso é útil quando se quer destacar o avanço do desmatamento ou o avanço da urbanização, épocas chuvosas ou de seca, além de seus efeitos no terreno, entre outras utilidades.
Durante a década de 1970, o Governo Federal Brasileiro iniciou o Projeto RADAM (Radar da Amazônia) com o objetivo de realizar o levantamento aerofotogramétrico de radar na Amazônia. Esse sistema foi escolhido por ser um sensor ativo que consegue ultrapassar as nuvens e a vegetação da região amazônica. Devido ao sucesso do projeto, o Governo Federal estendeu para todo o país. Dessa forma, surgiu o projeto RADAMBRASIL. Conheça mais sobre esse projeto, acessando o link a seguir.
O comportamento espectral do alvo é de suma importância em estudos do Sensoriamento Remoto. Assinale a alternativa que apresenta em qual faixa do espectro eletromagnético ocorre o pico máximo da vegetação.

Editora : Parêntese Editora
Autor : John R. Jensen
ISBN : 978-85-60507-06-1
Comentário : O Livro aborda a teoria e os usos do Sensoriamento Remoto.

Ano : 2018
Comentário : O vídeo aborda algumas das histórias do desenvolvimento do projeto RADAM, narrado por pesquisadores que trabalharam no projeto.
Nessa unidade abordamos os sistemas de posicionamento por satélite GPS, GLONASS, Beidou e Galileo. Além disso, tratamos sobre a arquitetura de sistemas de informações geográficas, a importância dos dados geoespaciais matriciais e vetoriais e os dados alfanuméricos que se associam as informações espaciais pelos arquivos vetoriais. Aprendemos sobre os fundamentos do Sensoriamento Remoto, a evolução desde das imagens obtidas de um balão até aquelas obtidas por satélites em órbita. Nesse sentido, vimos sobre o espectro eletromagnético, que é extremamente importante para a compreensão de como a luz solar é refletida e captada pelos sensores dos satélites. Vimos o comportamento dos alvos e suas diferentes maneiras de refletir a luz solar em diferentes comprimentos de onda. Além disso, vimos também as características das imagens de satélite multiespectrais e a construção de composições coloridas. Essas definições e exemplificações nos ajudam a construir a ideia de uso do sensoriamento remoto na elaboração de mapas por uso dos SIGs. É a partir do comportamento espectral de alvos que podemos elaborar índices, elaborar mapeamentos e realizar o monitoramento da superfície terrestre.
CÂMARA, G.; MEDEIROS, J. S. Geoprocessamento para projetos ambientais . São José do Campos: INPE, 1998.
CARVALHO, E. A.; ARAÚJO, P. C. Noções básicas de sistema de posicionamento global GPS . Natal: UFRN, 2009.
DOMPIERI, M. H. G.; SILVA, M. A. S. D.; NOGUEIRA JÚNIOR, L. R. Sistemas de referência terrestre e posicionamento por satélite . Aracaju: Embrapa Tabuleiros Costeiros, 2015.
FITZ, P. R. Geoprocessamento sem complicação . São Paulo: Oficina de Textos, 2008.
FLORENZANO, T. G. Imagens de satélite para estudos ambientais . São Paulo: Oficina de Textos, 2002.
GRÁFICA CARTEX. Diferenças entre os sistemas de cores CMYK e RGB. Gráfica Cartex, 27 fev. 2019. Disponível em: http://www.graficacartex.com.br/diferenca-entre-cmyk-e-rgb/ . Acesso em: 17 maio 2019.
INMET. Exemplo de imagem do satélite geoestacionário GOES-16 , 2019. Disponível em: http://www.inmet.gov.br/satelites/ . Acesso em: 17 maio 2019.
INPE. Divisão de Geração de imagens , 2019a. Disponível em: http://www.dgi.inpe.br/documentacao/satelites . Acesso em: 8 maio 2019.
INPE. Exemplo de imagens dos satélites orbitais CBERS-4 e Landsat 8 , 2019b. Disponível em: http://www.inpe.br/noticias/noticia.php?Cod_Noticia=4819 . Acesso em: 8 maio 2019.
JENSEN, J. R. Sensoriamento remoto do ambiente : uma perspectiva em recursos terrestres. São José dos Campos: Parêntese Editora, 2009.
LI, X.; ZHANG, X.; REN, X.; FRITSCHE, M.; WICKERT, J.; SCHUH, H. Precise positioning with current multi-constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou. Scientific Reports , v. 5, n. 1, p. 8328, 9 fev. 2015. ISSN 2045-2322. Disponível em: https://doi.org/10.1038/srep08328 . Acesso em: 20 fev. 2019.
MENESES, P. R. Modelos de cores aplicados às imagens. In: MENESES, P. R.; ALMEIDA, T. D. (Org.). Introdução ao processamento de imagens de sensoriamento remoto . Brasília: CNPq, 2012a. p. 121-137.
MENESES, P. R. Princípios de sensoriamento remoto. In: MENESES, P. R.; ALMEIDA, T. D. (Org.). Introdução ao processamento de imagens de sensoriamento remoto . Brasília: CNPq, 2012b. p. 1-34.
MONICO, J. F. G. Posicionamento pelo GNSS : descrição, fundamentos e aplicações. 2. ed. São Paulo: Editora UNESP, 2008.
MOREIRA, M. A. Fundamento do sensoriamento remoto e metodologias de aplicação . 3. ed. Viçosa: Ed. UFV, 2005.
ROSA, R. Introdução ao Geoprocessamento . Uberlândia: UFU, 2013.